




























Description of CANopen
7100.006424_Bus description_PSD4xx_CA_H_ENG
14
08.04.2020
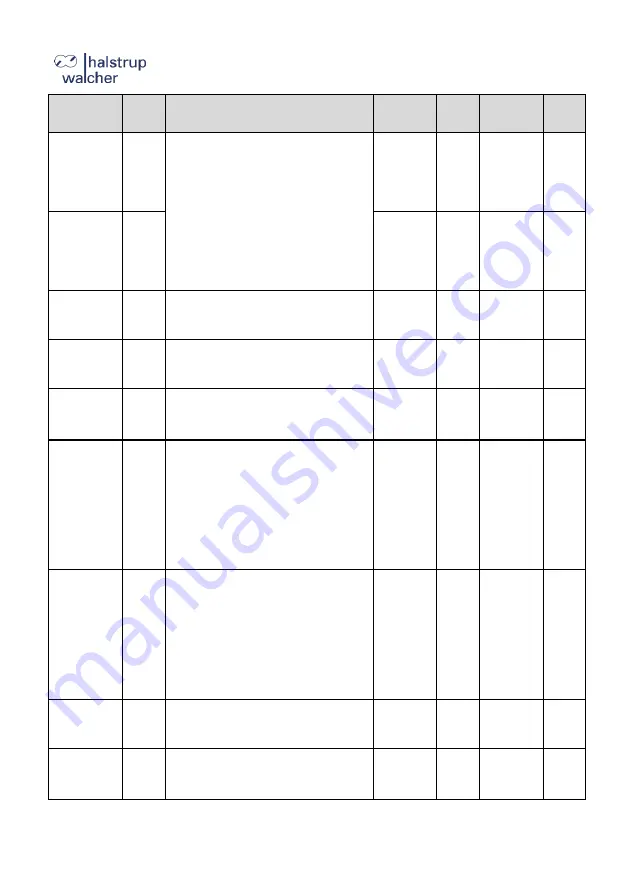
Designation Index
no.
Function
Range of
values
Back
up?
Delivery
state
R/W
Actual
value
assess-
ment,
numerator
2010
These values allow you to apply any
resolution to the drive that you wish.
For a numerator factor of 400, the
spindle pitch/resolution is stated in
the denominator factor
e.g.: Spindle pitch 1.5mm with
resolution 1/100 mm:
numerator = 400, denominator = 150
1...
10000
16 bit
Yes
400
R/W
Actual
value
assess-
ment, de-
nominator
2011
1...
10000
16 bit
Yes
400
R/W
Target rpm
Posi
2012
Maximum rpm to be used for
positioning runs; value in rpm
see
chap. 3.3
16 bit
Yes
see
chap. 3.3
R/W
Target rpm
Manual
2013
Maximum rpm to be used for manual
runs; value in rpm
see
chap. 3.3
16 bit
Yes
see
chap. 3.3
R/W
Maximum
current
2014
Applies after the end of the start-up
phase (during start-up phase, the
value #2018 applies); value in mA
see
chap. 3.3
16 bit
Yes
see
chap. 3.3
R/W
Upper limit
2016
Maximum permitted target position
Permissible values: (Upper mapping
end - 1200..1611600 *
denominator/numerator)
For models with an auxiliary
gearbox, the range of values is
reduced in accordance with the gear
ratio.
31 bit
Yes
see
chap. 3.3
R/W
Lower limit
2017
Minimum permissible target position
Permissible values: (Upper mapping
end - 1200..1611600 *
denominator/numerator)
For models with an auxiliary
gearbox, the range of values is
reduced in accordance with the gear
ratio.
31 bit
Yes
See
chap. 3.3
R/W
Max. start-
up current
2018
Value in mA
See
chap. 3.3
16 bit
Yes
See
chap. 3.3
R/W
Time period
for start-up
current
2019
Value in ms
10...
1000
16 bit
Yes
200
R/W







































































