





























Description of CANopen
7100.006424_Bus description_PSD4xx_CA_H_ENG 21
08.04.2020
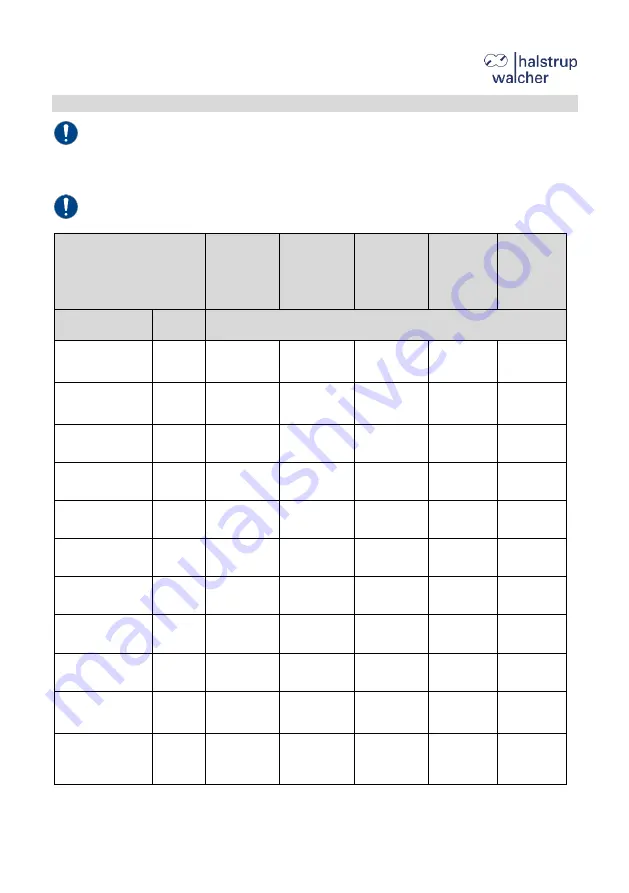
3.3
Table of device-dependent Min., Max. and Default values
Note:
The operating current setting is optimised for the nominal rated speed of the
respective device model. The more the set speed deviates from the nominal rated
speed (rpm), the greater the actual power consumption deviates from the set
current value.
Note:
Setting the value for the holding current to 0 results in a maximum current
consumption by the motor circuit of approx. 50mA.
Device type
PSD401 /
PSD411
- 5V
PSD401 /
PSD411
- 8H/14H
PSD403 /
PSD413
- 8H/14H
PSD422
/ PSD432
- 8V
PSD422 /
PSD432
- 8H/14H
Name
SDO
Range of values
Delivery state
Upper Limit *)
2016
-
805.200
-
805.200
-
197.298
-
805.200
-
805.200
Lower Limit *)
2017
-
-805.200
-
-805.200
-
-197.298
-
-805.200
-
-805.200
Target rpm for
positioning run
2012
1…800
200
1…500
200
1…250
50
1…1000
200
1…500
200
Target rpm,
manual run
2013
1…800
70
1…500
70
1…250
17
1…1000
70
1…500
70
Acceleration
201C
1…5000
2000
1…5000
2000
1…1250
500
1…5000
2000
1…5000
2000
Deceleration
201D
1…5000
2000
1…5000
2000
1…1250
500
1…5000
2000
1…5000
2000
Max. operating
current
2014
5…2000
750
5…2000
750
5…2000
750
5…4000
1500
5…4000
1500
Max. start-up
current
2018
5…2000
1000
5…2000
1000
5…2000
1000
5…4000
2000
5…4000
2000
Max. holding
current
202B
0…300
30
0…300
30
0…300
30
0…400
40
0…400
40
Upper
mapping end *)
2028
-
806.400
-
806.400
-
198.498
-
806.400
-
806.400
Max. holding
current at the
end of a run
2042
0…600
60
0…600
60
0…600
60
0…800
80
0…800
80







































































