





















Start-up
7100.006424_Bus description_PSD4xx_CA_H_ENG
7
08.04.2020
2.2
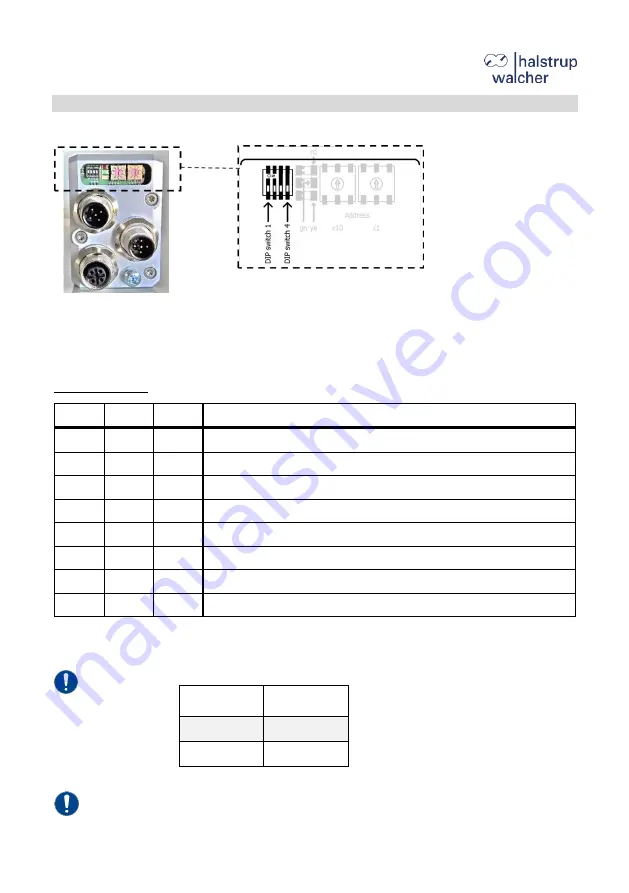
Set the baud rate
You can set the baud rate using the sliding switches S2-S4 (DIP switch 2-4).
The device controls and status elements are located under the sealing plug. You will need a
non-conducting pointed object to adjust the switches.
Please refer to the following table to find the correct baud rate settings and adjust the sliding
switches S2-S4 (DIP switch 2-4) accordingly:
Table: Baud rate:
S2
S3
S4
Description
OFF
OFF
OFF
Set baud rate via bus (default = 500 kBaud)
ON
OFF
OFF
20 kBaud
OFF
ON
OFF
50 kBaud
ON
ON
OFF
125 kBaud
OFF
OFF
ON
250 kBaud
ON
OFF
ON
500 kBaud
OFF
ON
ON
800 kBaud
ON
ON
ON
1000 kBaud
Turn the device off and on again or use the reset command via the control unit to accept the
new setting.
Note:
Maximum
bus length
Baud rate
250 m
250 kBaud
100 m
500 kBaud
Note:
If the sliding switches S2-S4 are set to OFF, the baud rate is set via the
CAN bus with SDO #2027.







































































