


























Functions
7100.006434_Bus description_PSD4xx_IO_J_ENG
47
2022-09-13
d) Shifting the positioning range depending on the actual position
If (in contrast to the examples above) the actual position is not in the delivery state (i.e. value 0),
this is included in the calculation of the possible value range for the upper mapping end. The
decisive factor is that the device only accepts values for the upper mapping end where the actual
position is within the max. possible positioning range after the upper mapping end has been set
(due to rounding effects with a max. difference of 1 step), i.e. the following applies after setting the
upper mapping end:
[lower limit -
1] ≤ actual position ≤ [upper limit + 1]
Please note that the measurement range of the absolute encoder is 4,032 rotations at the motor
shaft. Depending on the ratio of the auxiliary gearbox, the measurement range at the output shaft
is reduced accordingly. Together with the safety margins at the upper and lower end of the
measurement range, the following value ranges result for the upper mapping end:
Minimum value for upper mapping end = actual po 1200 * denominator / numerator
Maximum value for upper mapping end = actual po a * denominator / numerator
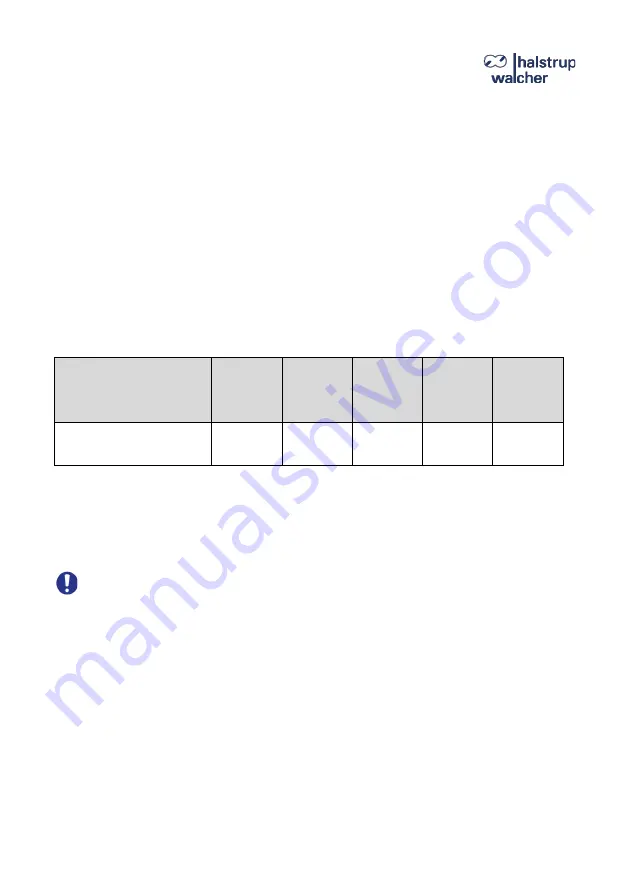
The variable
a
differs between the individual device variants:
Device type
PSD
401/411,
422/432,
480/490
PSD
403/413,
481/491
PSD
424/434
PSD
426/436
PSD
428/438
Variable
a
1,611,600
395,797
776,400
510,800
392,166
The following formulas result for the special case numerator = denominator:
Minimum value for upper mapping end = actual po 1200
Maximum value for upper mapping end = actual po a
(This is the case, e.g. for the delivery state where numerator = denominator = 400.)
Note:
Since the upper mapping end is an integer, the minimum and maximum values are
obtained by rounding to the nearest integer (applies only to the case numerator ≠
denominator).





























































