























Functions
7100.006434_Bus description_PSD4xx_IO_G_ENG
28
17.08.2020
4.2
Types of positioning
4.2.1
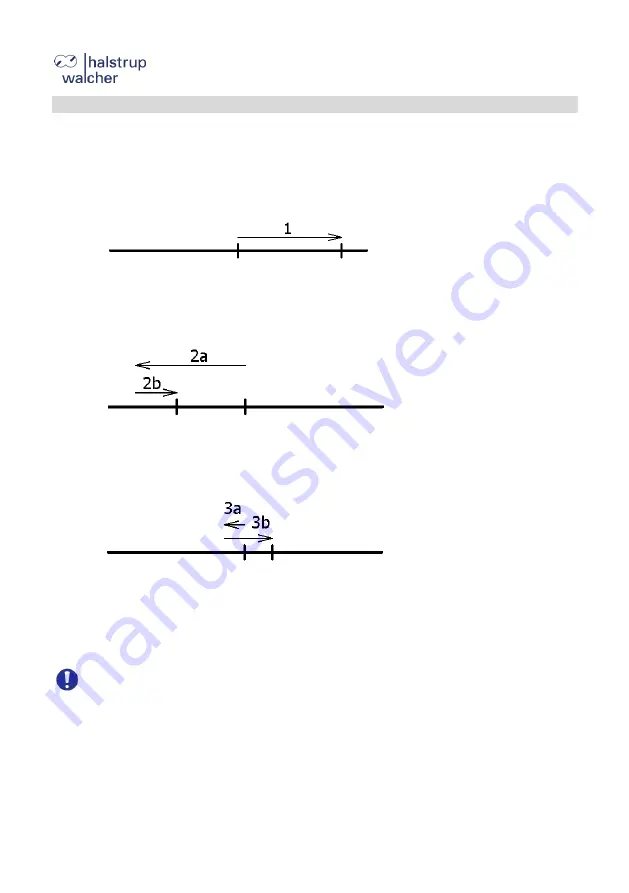
Positioning run with loop
The PSD4xx distinguishes between the following steps of a positioning sequence
(Assumption: the target position is always approached through forward motion)
1.
New position value is larger than the current value: position approached directly.
2.
New position value is smaller than the current value: the drive reverses an
additional 5/8 of one rotation (2a) and approaches the exact position after
resuming forward motion (2b)
3.
New position value after reverse run (no loop): the drive always approaches by
moving forward (3b), if necessary, it will first reverse by 5/8 of a rotation (3a).
After reaching the target position, this position is compared with the internal absolute
encoder position. If the deviation is more than 0.9° (at the motor shaft) a second positioning
is automatically started and the drive will move to the target position again. If there is
another deviation of more than 0.9°
, the status bit “Positioning error (block)” is set.
Note:
It is not possible to perform a positioning run to the upper limit (ISDU 121)
with a loop length < 0 because the drive would have to run past the upper limit in
order to do so. The same applies to the lower limit (ISDU 122) with loop length > 0.
4.2.2
Positioning run without loop
The “positioning without loop” mode is used primarily for moving the small distances
involved in fine adjustments. In this case, each position is approached directly.
Actual
Actual
Actual
Target
Target
Target

























































