




























Spider
EN
Feeding computer
-
Voercomputer
-
Fütterungscomputer
-
Logiciel d
’
alimentation
Index
31
-
46
Hanskamp AgroTech B.V. (The Netherlands)
www.hanskamp.nl/en
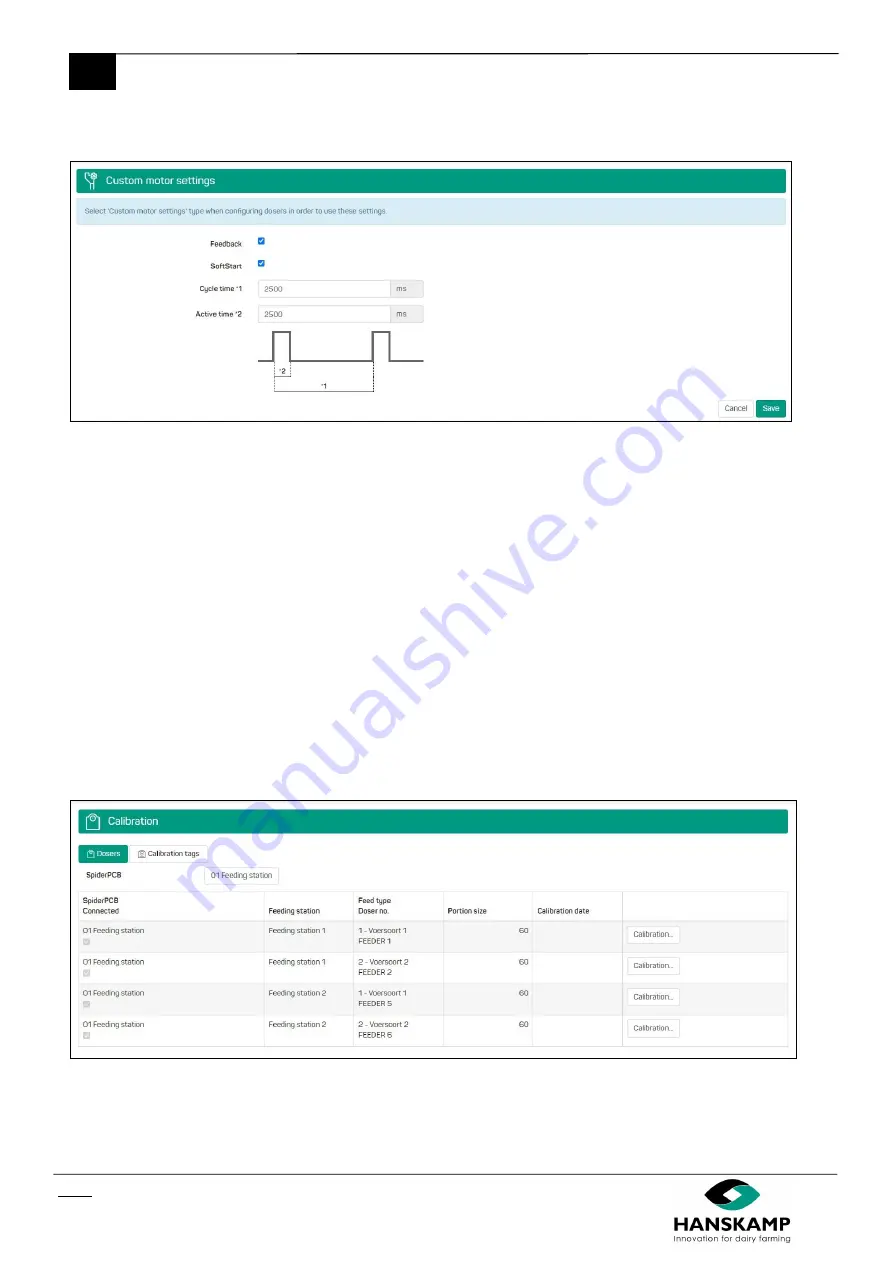
7.4 Manual motor settings
If another type of motor is used, the actuation time and interval time can be specified here.
Feedback
After a motor has been actuated, feedback is expected within the cycle. After actuation, feedback is ignored for a set time
(SpiderPCB parameter 50002
-
Default = 500msec) to prevent the motor from stopping just before or when feedback is
given. If the feedback option is selected, the feedback must be seen before the end of the cycle and the motor will stop.
Cycle
This is the time allowed for the motor to dispense one portion. A second actuation is only possible after the cycle has been
completed. This means that the cycle must always (!) be greater than or equal to the actuation time.
Actuation time
This is the time that the exit of the motor is actuated (raised).
Soft Start
This setting is not used.
7.5 Calibration
Calibration is important to ensure correct feed dispensing. Perform a calibration with each new feed delivery or if the type
of feed has been changed. Calibrate at least 2 times a year, to continuously ensure correct feed dispensing.
To calibrate, go to 'System'
-
>
'Calibration'.
Then click on 'Calibration' and follow the instructions on the screen. Use a (kitchen) scale to weigh the feed. Do this for each
feeder.