





























Intelligence Aided Lifting Equipment
32
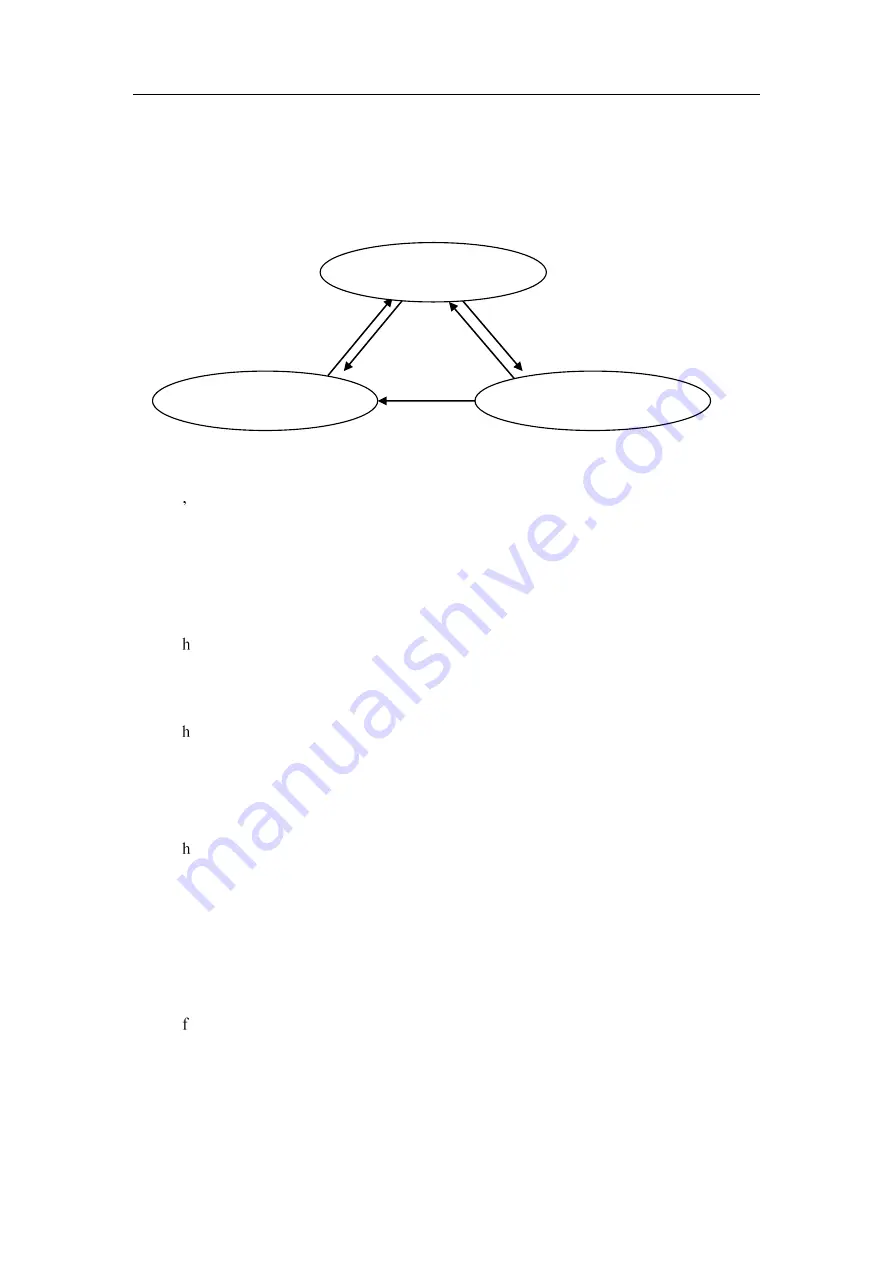
4.8 Function switch
The equipment lifting control module is switched among the three modes of “locking mode”,
“mode of manual hold”, and “suspension (suspension unloading, and unloading) mode” (Fig. 4 4),
each state responds to external signals and makes different controls.
Under the following several conditions the “mode of manual hold” may be switched to
“locking mode”.
1.
Holding the infrared sensor without signal.
2.
The IR sensor has a signal when held manually, but the handle position sensor is zero
and the time exceeds the manual timeout setting.
Under the following several conditions the “locking mode” may be switched to “mode of
manual hold”.
1.
When there is no alarm, the infrared sensor is held from no signal to having a signal.
From “suspension (suspension unloading, unloading) mode” to “locking mode”
1.
No operation suspension mode shall exceed the set value.
2.
The manual moving load speed exceeds the maximum suspension speed by 90%
(over-speed).
Under the following several conditions the “locking mode” may be switched to
“suspension (suspension unloading, unloading) mode”.
1.
When there is no alarm, long press the “ESC” button on the handle for about 2 seconds
to enter the suspension mode, or long press the “UP” button on the handle for about 2
seconds to enter the suspension mode, or long press the “DOWN” button on the handle
for about 2 seconds to enter the suspension mode.
Under the following several conditions the “suspension (suspension unloading, unloading)
mode” may be switched to “mode of manual hold”.
1.
Trigger the infrared sensor.
4
3
2
1
Mode of manual hold
Locking mode
Suspension (suspension
unloading, unloading)
5
Fig. 4 4 Mode switch







































































