




























-
103
-
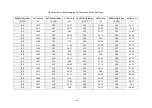
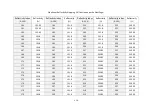
Δt(n) – Firing Time Offset of Each Channel (Unit: ns)
(continued on the next page)
Operational State
High Performance
Standard or Energy Saving
Azimuth Flag
0
1
2
3
0
1
Firing Type
Far
Near
Far
Near
Far
Near
Far
Near
Far
Near
Far
Near
Channel
#
41
19521
19521
19871
19871
19521
19521
19171
19171
19521
19521
19521
19521
42
17236
17236
17586
17586
17236
17236
16886
16886
17236
17236
17236
17236
43
12666
12666
13016
13016
12666
12666
12316
12316
12666
12666
12666
12666
44
21806
21806
22156
22156
21806
21806
21456
21456
21806
21806
21806
21806
45
8096
8096
8446
8446
8096
8096
7746
7746
36224
36224
35524
35524
46
21806
21806
22156
22156
21806
21806
21456
21456
21806
21806
21806
21806
47
10381
10381
10731
27406
10381
10381
10031
10031
38509
55184
37809
37809
48
10381
10381
10731
10731
10381
10381
10031
10031
38509
38509
37809
37809
49
21806
21806
22156
22156
21806
21806
21456
21456
21806
21806
21806
21806
50
8096
8096
8446
8446
8096
8096
7746
7746
36224
36224
35524
35524
51
8096
8096
8446
8446
8096
8096
7746
7746
36224
36224
35524
35524
52
19521
19521
19871
19871
19521
19521
19171
19171
19521
19521
19521
19521
53
12666
12666
13016
13016
12666
12666
12316
12316
12666
12666
12666
12666
54
12666
12666
13016
13016
12666
27056
12316
12316
12666
12666
12666
27056
55
24091
24091
24441
24441
24091
24091
23741
23741
52219
52219
51519
51519
56
24091
24091
24441
24441
24091
24091
23741
23741
52219
52219
51519
51519
57
17236
17236
17586
17586
17236
17236
16886
16886
17236
17236
17236
17236
58
21806
21806
22156
22156
21806
21806
21456
21456
21806
21806
21806
21806
59
17236
17236
17586
17586
17236
17236
16886
16886
17236
17236
17236
17236
60
14951
14951
15301
15301
14951
14951
14601
14601
43079
43079
42379
42379
Summary of Contents for Pandar128E3X
Page 1: ...www hesaitech com HESAI Wechat Pandar128E3X 128 Channel Mechanical LiDAR User Manual...
Page 11: ...9 2 Setup 2 1 Mechanical Installation Figure 2 1 Front View Unit mm...
Page 12: ...10 Figure 2 2 Bottom View Unit mm...
Page 13: ...11 Quick Installation Figure 2 3 Quick Installation...
Page 14: ...12 Stable Installation Figure 2 4 Stable Installation...
Page 57: ...55 4 6 Monitor The LiDAR s input current voltage and power consumption are displayed...
Page 60: ...58 4 9 Security Cyber Security Master Switch OFF Cyber Security Master Switch ON...
Page 70: ...68 In case the following warnings appear select Trust this CA to identify websites...







































































