
























-
110
-
Appendix IV
Nonlinear Reflectivity Mapping
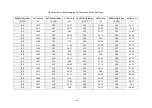
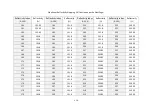
By default, the 1-byte reflectivity data in Point Cloud Data Packets linearly represents target reflectivity from 0 to 255%.
Alternatively, users may choose the Nonlinear Mapping mode, see Chapter 4 (Web Control - Settings).
■ Nonlinear Mapping 1#
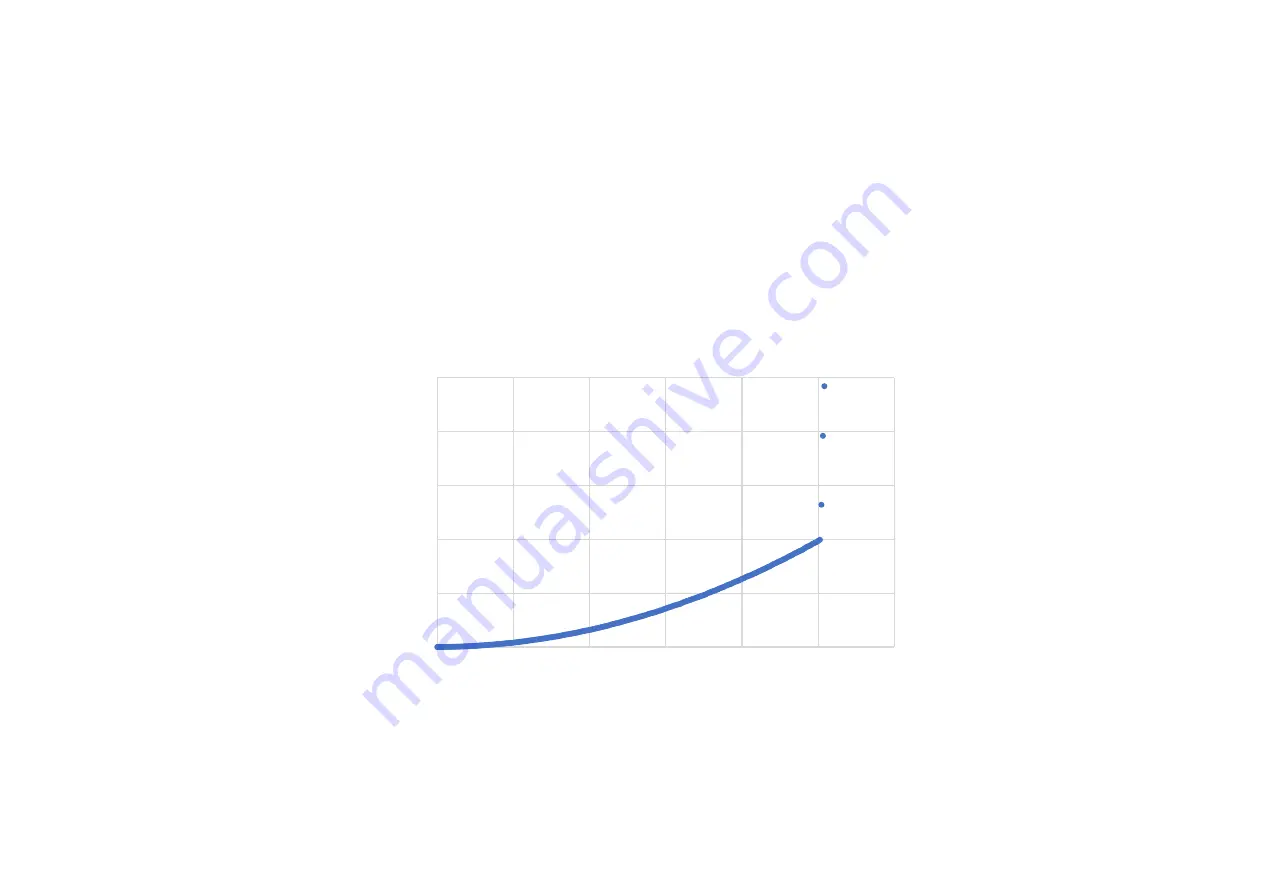
This mapping increases the contrast in low-reflectivity region. The nonlinear relationship is detailed below.
Reflectivity Index (0~255)
Figure IV.1 Nonlinear Reflectivity Mapping
0
50
100
150
200
250
0
50
100
150
200
250
300
Ac
tual R
eflec
tivity
%
Summary of Contents for Pandar128E3X
Page 1: ...www hesaitech com HESAI Wechat Pandar128E3X 128 Channel Mechanical LiDAR User Manual...
Page 11: ...9 2 Setup 2 1 Mechanical Installation Figure 2 1 Front View Unit mm...
Page 12: ...10 Figure 2 2 Bottom View Unit mm...
Page 13: ...11 Quick Installation Figure 2 3 Quick Installation...
Page 14: ...12 Stable Installation Figure 2 4 Stable Installation...
Page 57: ...55 4 6 Monitor The LiDAR s input current voltage and power consumption are displayed...
Page 60: ...58 4 9 Security Cyber Security Master Switch OFF Cyber Security Master Switch ON...
Page 70: ...68 In case the following warnings appear select Trust this CA to identify websites...







































































