
















-
118
-
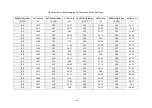
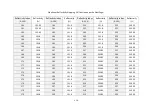
Nonlinear Reflectivity Mapping 2# (Continued on the Next Page)
Reflectivity Index
(0~255)
Reflectivity
(%)
Reflectivity Index
(0~255)
Reflectivity
(%)
Reflectivity Index
(0~255)
Reflectivity
(%)
Reflectivity Index
(0~255)
Reflectivity
(%)
160
102.65
180
151.8
200
151.8
220
200.95
161
102.65
181
151.8
201
151.8
221
200.95
162
102.65
182
151.8
202
151.8
222
200.95
163
151.8
183
151.8
203
151.8
223
200.95
164
151.8
184
151.8
204
151.8
224
200.95
165
151.8
185
151.8
205
151.8
225
200.95
166
151.8
186
151.8
206
151.8
226
200.95
167
151.8
187
151.8
207
200.95
227
200.95
168
151.8
188
151.8
208
200.95
228
200.95
169
151.8
189
151.8
209
200.95
229
200.95
170
151.8
190
151.8
210
200.95
230
200.95
171
151.8
191
151.8
211
200.95
231
200.95
172
151.8
192
151.8
212
200.95
232
200.95
173
151.8
193
151.8
213
200.95
233
200.95
174
151.8
194
151.8
214
200.95
234
200.95
175
151.8
195
151.8
215
200.95
235
200.95
176
151.8
196
151.8
216
200.95
236
200.95
177
151.8
197
151.8
217
200.95
237
200.95
178
151.8
198
151.8
218
200.95
238
200.95
179
151.8
199
151.8
219
200.95
239
200.95
Summary of Contents for Pandar128E3X
Page 1: ...www hesaitech com HESAI Wechat Pandar128E3X 128 Channel Mechanical LiDAR User Manual...
Page 11: ...9 2 Setup 2 1 Mechanical Installation Figure 2 1 Front View Unit mm...
Page 12: ...10 Figure 2 2 Bottom View Unit mm...
Page 13: ...11 Quick Installation Figure 2 3 Quick Installation...
Page 14: ...12 Stable Installation Figure 2 4 Stable Installation...
Page 57: ...55 4 6 Monitor The LiDAR s input current voltage and power consumption are displayed...
Page 60: ...58 4 9 Security Cyber Security Master Switch OFF Cyber Security Master Switch ON...
Page 70: ...68 In case the following warnings appear select Trust this CA to identify websites...







































































