





























System
Product Description
HI 803 211 E Rev. 1.01.00
Page 61 of 110
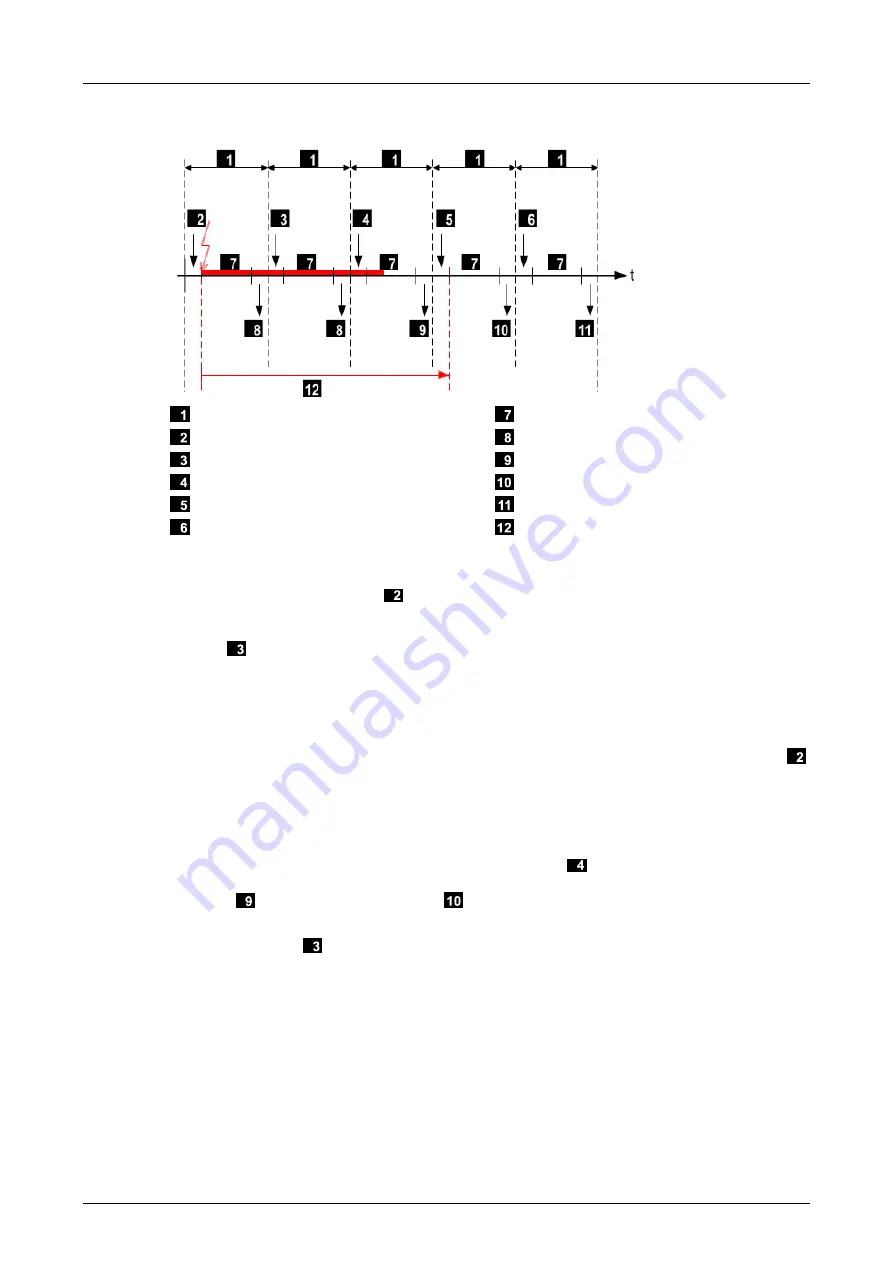
Example 2: Triggering a safety-related response when interference occurs
Cycle, duration = watchdog time
Reading in cycle 1
Reading in cycle 2
Reading in cycle 3
Reading in cycle 4
Reading in cycle 5
Processing (in all cycles)
Output process in cycle 1 and 2
Output process in cycle 3
Output process in cycle 4
Output process in cycle 5
Duration of safety time
Figure 31: Interference Triggers a Safe Response
In example 2, valid input values
are read within one cycle. For this cycle, the system
processes the valid input values, even though an interference occurred directly upon completion
of the read-in process. If the interference is still present in the following cycle during the read-in
process
, the module detects the interference and the system decides if noise blanking can
be performed at this point in time based on the following rule:
Safety time - elapsed time - (2 x watchdog time) > 0
Noise blanking is possible in the 1st and 2nd cycle since the interference is present for less than
a cycle ( = elapsed time) and two additional cycles (2 x watchdog time) are available for
triggering a safe response. For this cycle, the system processes the last valid input values of
and no defined fault response is triggered. The transient interference was successfully blanked
out.
In case of a ratio of safety time/watchdog time = 3/1, as in example 2, two cycles are still
available for the safe response
If the interference is still present in the next read-in process
, the fault response must be
triggered in that cycle. The fault response must be triggered no later than when the outputs are
written to
. At the next output moment
, the safety time has already expired.
If noise blanking is not active, the system immediately triggers the defined fault response during
the read-in process
.
Summary of Contents for HIQuad H41X
Page 1: ...Manual HIQuad X System Manual...
Page 109: ......






































































