





























■
Operation parameters
18
/
52
7.2 Screen display items
■
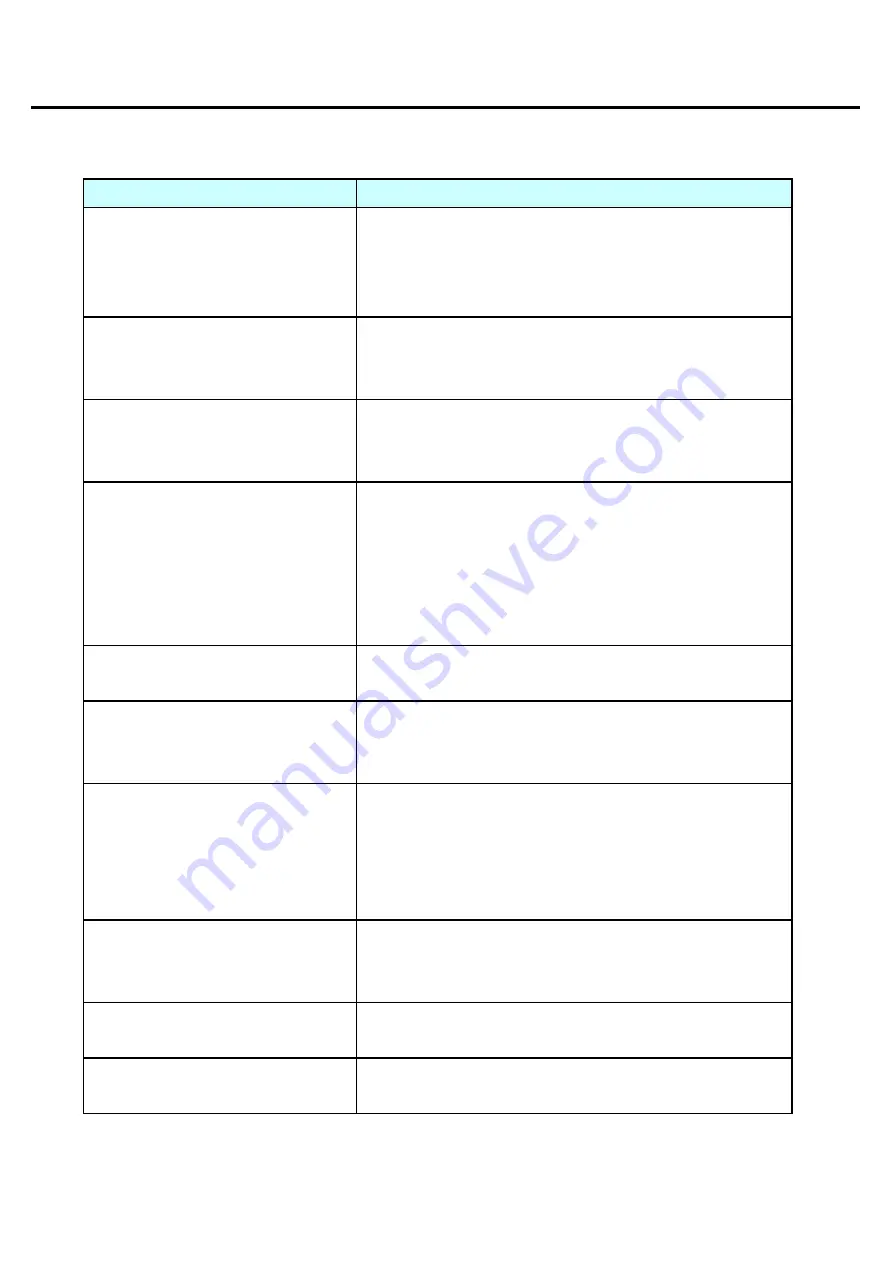
Screen display items (numeric input)
Numeric input item
Description
1st hold time w/rev
(Holding time for first full tightening in
operation patterns that include reverse
rotation)
Set the holding time for the first full tightening in operation patterns that
include reverse rotation.
The unit is ms. * See Chapter 15 "Holding time".
Tmp chat period
(Chattering judgment period for temporary
tightening)
Set the period of one scan in the current chattering judgment for
temporary tightening.
The unit is ms. * See Chapter 16.
Tmp chat counter
(Chattering judgment count for temporary
tightening)
Set the number of scans to perform in the current chattering judgment
for temporary tightening.
The unit is the number of times. * See Chapter 16.
Full/Add – Specified current
(Negative current value used for judgment
of whether the specified current is reached
in full tightening and additional tightening)
This is the parameter setting to use in the calculation of the current for
the torque detection judgment, to speed up torque-up detection for full
tightening and additional tightening.
The specified percentage amount is subtracted from the full tightening
and additional tightening current.
The unit is -%.
Reverse Speed
(Reverse operation speed)
Set the speed of the reverse operation. The unit is rpm.
Motor KT (spec)
(Motor KT value (specification value))
Set the KT value of the motor that is used. (Refer to the motor
specifications.)
The unit is N.m/A.
Motor KT offset
Motor KT high/low
(Motor KT value offset
+ setting torque-down
- setting torque-up)
Set the positive and negative offset value to apply to the motor KT
value.
This corrects for the difference between the motor torque and actual
tightening torque.
The unit is N.m/A.
Torque Coeff
(Torque command correction slope
coefficient)
This correction value is applied to the torque command to stabilize it.
(Perform calculation using the correction value calculation file.)
Torque offset Coeff
(Torque command correction offset value)
This correction value is applied to the torque command to stabilize it.
(Perform calculation using the correction value calculation file.)
Motor Torque Coeff
(Motor torque correction slope coefficient)
This coefficient corrects for the difference between the motor torque
and actual tightening torque.
Summary of Contents for DCD-40L
Page 1: ...Current Controlled Screwdriver DCD 40L 115W Instruction Manual ET A070 19A HIOS Inc ...
Page 27: ... Operation timing charts 27 52 Pattern 2 ...
Page 28: ... Operation timing charts 28 52 Pattern 3 ...
Page 29: ... Operation timing charts 29 52 Pattern 4 ...
Page 37: ... I O 37 52 Timing chart for normal operations when torque judgment is NG ...
Page 38: ... I O 38 52 Timing chart when emergency stop signal is input ...







































































