





























Fig. 5-1
Microcomputer
External ROM
SCL
SDA
0V
0V
0V
5V
5V
5V
C401
IC401 or IC402 (E
2
PROM)
R404
R403
27
26
1
2
3
4
8
7
6
5
}
Voltage at point A
Waveform
T1 = Low speed
T2 = High speed
T2
T1
Voltage at point B
Waveform
T1
Voltage at point C
Waveform
Speed
(min
-1
)
T2
Voltage at point B (V)
(1400)
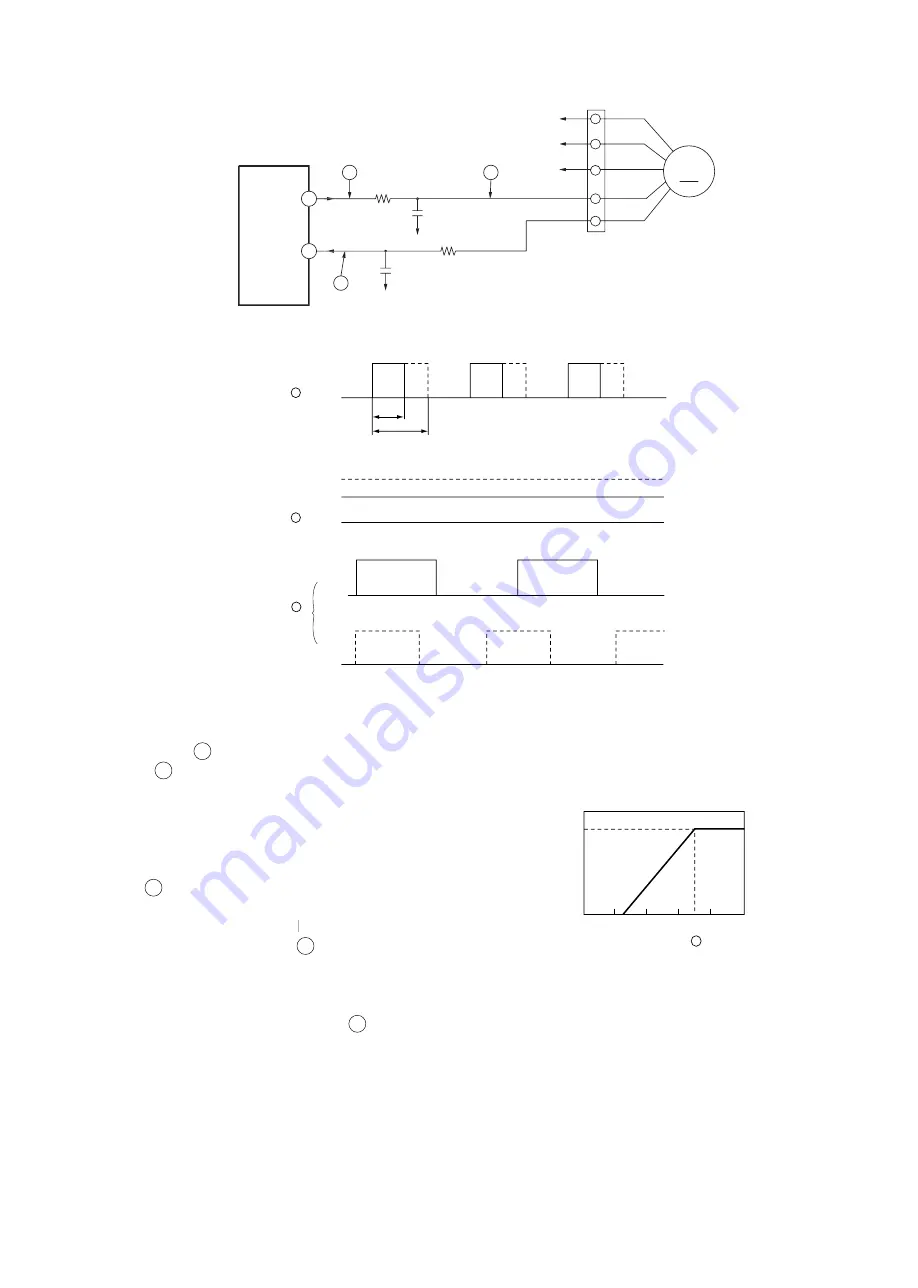
7. Fan Motor Drive Circuit
• For the point A , 15.7 kHz PWM pulse will be output from
the pin 24 on the micro computer as shown in Fig. 7-2.
The pulse range will vary with different command speed.
• The pulse is converted into the analog voltage by the
R751 and C751 and applied to the fan motor as the speed
command voltage.
Fig. 7-3 shows the relation between the voltage at the
due to the condition of the unit.)
• The fan motor outputs the feedbac
n motor outputs the f
n motor outputs the f
k pulse of the speed,
which is input into the pin 14 on the micro computer.
This pulse is equivalent to a frequency of 12/60 speed.
(Example: 1000 min
-1
x 12/60 = 200 Hz )
The micro computer monitors the frequency and adjusts
command speed.
•
stopped temporarily as fan lock error. After 10 seconds, restart the output of the pulse. If fan lock
error is detected twice within 30 minutes, all units are stopped and the unit will come in the failure
mode. (The timer lamp will blink 10 times.)
1
0
2
3
4
5
T1
T2
point B and the speed. (Some differences will occur
If the feedback pulse is 100 min
-1
or less due to a locked fan motor or failure, the fan output will be
the output pulse range of the pin 24 so as to keep the
M
24
14
C751
0V
A
R751
C631
R631
0V
C
CN10
0V
5V
B
35V
Micro computer
Fan motor
Fig. 7-1
DC fan
motor output
DC fan motor
Speed
feedback
Fig. 7-2
Fig. 7-3
- 41 -







































































