



























16
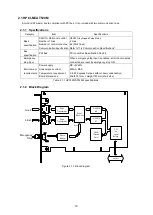
1.7.4 Slave Types
(1)
Model numbers
HMG - (Pn) (Wn) (Cn) (Tn) (Dn) (In) (On) (An) (Bn) (Sn)
Module specification
General-purpose slave
n: Number of modules (Total of n is 1 to 6)
HUG - (Pn) (Wn) (Cn) (Tn) (Dn) (In) (On) (An) (Bn) (Sn)
Module specification
General-purpose slave for USB connection
n: Number of modules (Total of each n is 1 to 6)
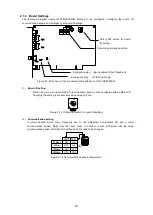
(2)
Slave configuration examples
Configuration
Model type
Configuration
Function
Motion only
HMG-P6
P
6
6-axis motion (Master board to/from PCI bus
access)
HUG-P4
P
4
4-axis motion (Master board to/from USB
access)
DIO
HM(U)G-P4D1
P
4 + D
1
4-axis 16-in/16-out
HM(U)G-P3T1D1
P
3 + T
1 + D
1
3-axis 40DI/24DO
DIO only
HM(U)G-D6
D
6
96DI/96DO
HU(M)G-T1D2
T
1 + D
2
56DI/40DO
Others
HM(U)G-P4D1A1
P
4 + D
1 + A
1
4-axis 16DI/16DO + 4AI/4AO
HM(U)G-P3T1R3
P
3 + T
1 + R
3
3-axis 40DI/24DO + 3 serial inputs
Table 1.7-4 Slave configuration examples
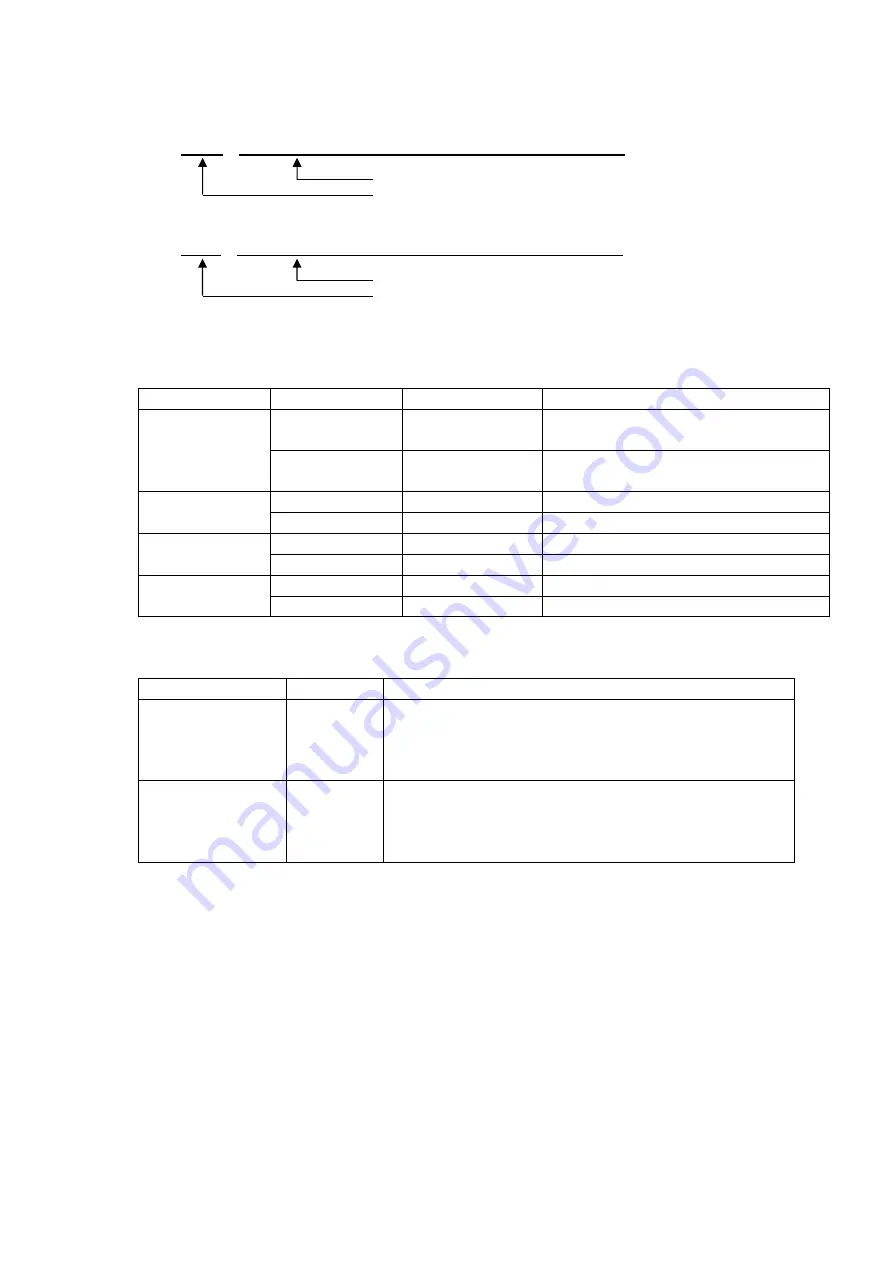
1.7.5 Connector Boards
Product name
Model no.
Features
12-in/4-out
connector board
for T module
ACB-TH1204
Connector for the sensor is eCON.
DO (for output) connector is JST XA type.
Power supply for the sensor and power supply for the output load
are supplied from the cable side.
24-in/8-out
connector board
for T module
ACB-TH2408
Connector for the sensor is eCON.
DO (for output) connector is JST XA type.
Power supply for the sensor and power supply for the output load
are supplied from the cable side.
Table 1.7-5 Connector boards
Summary of Contents for motionCAT HCPCI-MNT720M
Page 3: ......
Page 12: ...1 Warnings and Precautions...
Page 20: ...9 1 motionCAT Installation...
Page 109: ...98 4 Installation Guide...
Page 118: ...107 5 Device Driver Installation...
Page 122: ...111 6 Trial Operation...
Page 145: ...134 7 Accessories...
Page 147: ...136 8 Glossary...
Page 161: ...150 9 Connections to Drivers Supplied by Manufacturers...






































































