





























46
3.3 P Module HM-P100C
3.4 C Module HM-C100C
The P module is for single axis positioning.
The C module, like the P module, is for single axis positioning but it is provided with linear interpolation
function of multiple axes and circular interpolation of two axes.
In the subsequent explanation, functions and use common to P and C modules are described as P/C module.
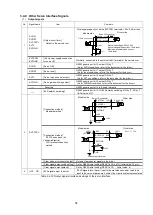
3.4.1 Specifications
Category
Item
Specifications
Remarks
Basic
specification
ASIC for Motionnet control
P module: G9003
C module: G9103B
by Nippon Pulse Motor
Axis control system
P module: 1-axis control
C module: Synchronous control (between C
modules)
Control method
Single axis positioning
Linear interpolation of multiple axes and
positioning (C module)
Circular interpolation of two axes and positioning
(C module)
Position command
Command pulses
Positioning pulse-train command output
Output element: Differential driver
Position command range
-134,217,728 to +134,217,727 [pulse]
[28-bit long]
Command coordinate
Relative coordinate command
Command range for continuous
feed
Unlimited
Position override
Possible
Change target position before position
completion
Speed control
Speed range
0.1 pps to 6.6 Mpps (x0.1 to x66.6)
[Speed register range: 17 bits,
Setting value range: 1 to 100,000]
0.1 time mode: 0.1 to 10kbps
1 time mode: 1 to 100kbps
10 times mode: 10 to 1Mbps
50 times mode: 50 to 5Mbps
As for encoder speed: 4.0 Mcps Max.
(when x4, differential input)
Speed override
Possible
Acceleration/deceleration control
Automatic
acceleration/deceleration system
S-curve acceleration/deceleration, partial
s-curve acceleration/deceleration, and linear
acceleration/deceleration
(All with triangular drive peak prevention
function)
During automatic acceleration/deceleration:
Asymmetrically sloped acceleration/deceleration
possible
Acceleration/deceleration range during the
slope of acceleration/deceleration
Example of accelerating from 50pps to
1Mpps:
Linear acceleration: 0.5ms to 261s
S-curve acceleration: 1ms to 522s
Function
specifications
Homing control
Homing method
13
ways of returning to a sensor’s origin, Z-phase origin, or ELS shared origin
Origin search
Available
Origin offset
Available
Counter function
Counter 1: command position (command pulse count) [28-bit long]
Counter 2: machine position (encoder count) [28-bit long]
Counter 3: general-purpose/error counter [17-bit long]
Comparators
Synchronization signal output
(CMP3 output)
Three comparators are available. These can be used for any counter above. CMP3 has its output
at the machine I/F connector.
With CMP3 and counter 3, CMP3 terminal output is possible at regular intervals.
Encoder input/pulsar input
Encoder input and pulsar input are directed to the same connector terminal. It can be selected by
the software.
Encoder output refers to differential output. (For input speed, refer to Basic specifications, Speed
range.)
Backlash compensation
Compensation pulses are inserted immediately before command operation for every turn of the
movement direction.
Counter during compensation can be enabled or disabled.
Vibration reduction when stopping Effective to suppress vibrations caused by stepping motor stop
Summary of Contents for motionCAT HCPCI-MNT720M
Page 3: ......
Page 12: ...1 Warnings and Precautions...
Page 20: ...9 1 motionCAT Installation...
Page 109: ...98 4 Installation Guide...
Page 118: ...107 5 Device Driver Installation...
Page 122: ...111 6 Trial Operation...
Page 145: ...134 7 Accessories...
Page 147: ...136 8 Glossary...
Page 161: ...150 9 Connections to Drivers Supplied by Manufacturers...







































































