



























85
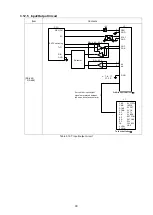
3.12 R Module HM-R100C
The R module is for receiving serial data from an absolute encoder-type servo driver to acquire absolute data.
This module connects the input and output signals for the servo driver one to one to extract the serial data from
the absolute encoder. The signals that come in from the servo driver are relayed through this module and output
to the controller from the other connector.
3.12.1 Specifications
Category
Item
Specifications
Remarks
Basic
specification
ASIC for Motionnet control
G9004A
by Nippon Pulse Motor
Number of ABS encoder serial
data communication channels
1ch
Supported servo drivers
[Recommended]
・
,
II,
III,
V series by Yaskawa Electric
(ABS-cum A-phase type)
[Others]
・
MINAS A, AIII, A4, A4F, A5 by Panasonic
・
AC Servo System R/Type S by Sanyo Denki
・
DC Servo System T/Type S by Sanyo Denki
・
,
II series (S-phase type) by Yaskawa Electric
Communication protocol
RS-422/485
Automatic switching of
settings by type of connected
servo driver
(Some manual setting
necessary depending on the
servo driver)
Baud rate (bps)
9600
Data length (bits)
Binary 8 bits / ASCII 7 bits
Start bit
1 bit
Parity
Even
Stop bit
1 bit
Flow control
Disabled
ABS encoder control signal output Absolute encoder clear signal / 1-bit general-purpose output
SEN signal
When using a servo driver by
Yaskawa Electric.
Environment
requirements
Power supply
DC +12V to DC +24V
Consumption current
Model no.
Consumption
current of the
communication
board 24V terminal
HMG-R1
HMG-R2
Temperature requirement
0 to 50 degrees Celsius without dew condensation
Module dimensions
(Excluding the connector’s
projecting part)
Module: Depth 85mm × Height 105mm
Outer dimensions of the frame: Depth 110mm × Height 115mm × Width 14.2mm
Table 3.12-1 R module, HM-R100C specifications
Summary of Contents for motionCAT HCPCI-MNT720M
Page 3: ......
Page 12: ...1 Warnings and Precautions...
Page 20: ...9 1 motionCAT Installation...
Page 109: ...98 4 Installation Guide...
Page 118: ...107 5 Device Driver Installation...
Page 122: ...111 6 Trial Operation...
Page 145: ...134 7 Accessories...
Page 147: ...136 8 Glossary...
Page 161: ...150 9 Connections to Drivers Supplied by Manufacturers...







































































