



























86
3.12.2 External Appearance
Figure 3.12-1 External appearance of R module, HM-R100C
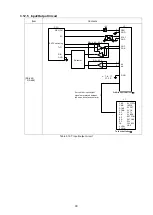
3.12.3 Switch Settings
Switches to set the manufacturer and type of the servo driver to connect are located on the top face of the
module. These settings are read when the power is turned ON. Hence, turn OFF the power first to change the
settings.
Figure 3.12-2 DIP SW positions
(1)
Connecting servo driver settings
DIP SW2 (SW2-1 to SW2-3)
Set the manufacturer and model number of the servo driver to connect, as well as the output signal type
of the encoder serial data. This module is set to "Yaskawa Electric A-phase+SEN signal type (2)" by
default, which is the recommended servo driver.
When connecting another servo driver, set by following the table below.
Setting
no.
SW2
-1
SW2
-2
SW2
-3
Manufacturer and model no.
Serial data output type
0
OFF
OFF
OFF
Panasonic A, AIII, A4, A4F, A5 series
RS485 ENQ-ACK
communication
1
ON
OFF
OFF
Sanyo Denki AC/DC Servo System
PS signal
2
OFF
ON
OFF
Yaskawa Electric
,
II,
III,
V series
PAO signal (A-phase) +
SEN signal
3
ON
ON
OFF
Yaskawa Electric
,
II series
PSO signal (S-phase)
4
OFF
OFF
ON
Setting forbidden
---
5
ON
OFF
ON
Setting forbidden
---
6
OFF
ON
ON
Setting forbidden
---
7
ON
ON
ON
Setting forbidden
---
Table 3.12-2 Connecting servo driver setting table
Connector for servo driver connection
(J2)
Connector for motion module
P100/C100 connection (J1)
DIP SW1
DIP SW2
Front face direction
Internal
logic
circuit
POW
ON
indicator (Green) inside the module
(ON by in5V logic circuit POW
ON)
◼
indicates default setting
Summary of Contents for motionCAT HCPCI-MNT720M
Page 3: ......
Page 12: ...1 Warnings and Precautions...
Page 20: ...9 1 motionCAT Installation...
Page 109: ...98 4 Installation Guide...
Page 118: ...107 5 Device Driver Installation...
Page 122: ...111 6 Trial Operation...
Page 145: ...134 7 Accessories...
Page 147: ...136 8 Glossary...
Page 161: ...150 9 Connections to Drivers Supplied by Manufacturers...







































































