





























20 / 183
Assembly and Commissioning Instructions Servo amplifier D1-N
15.10.2015
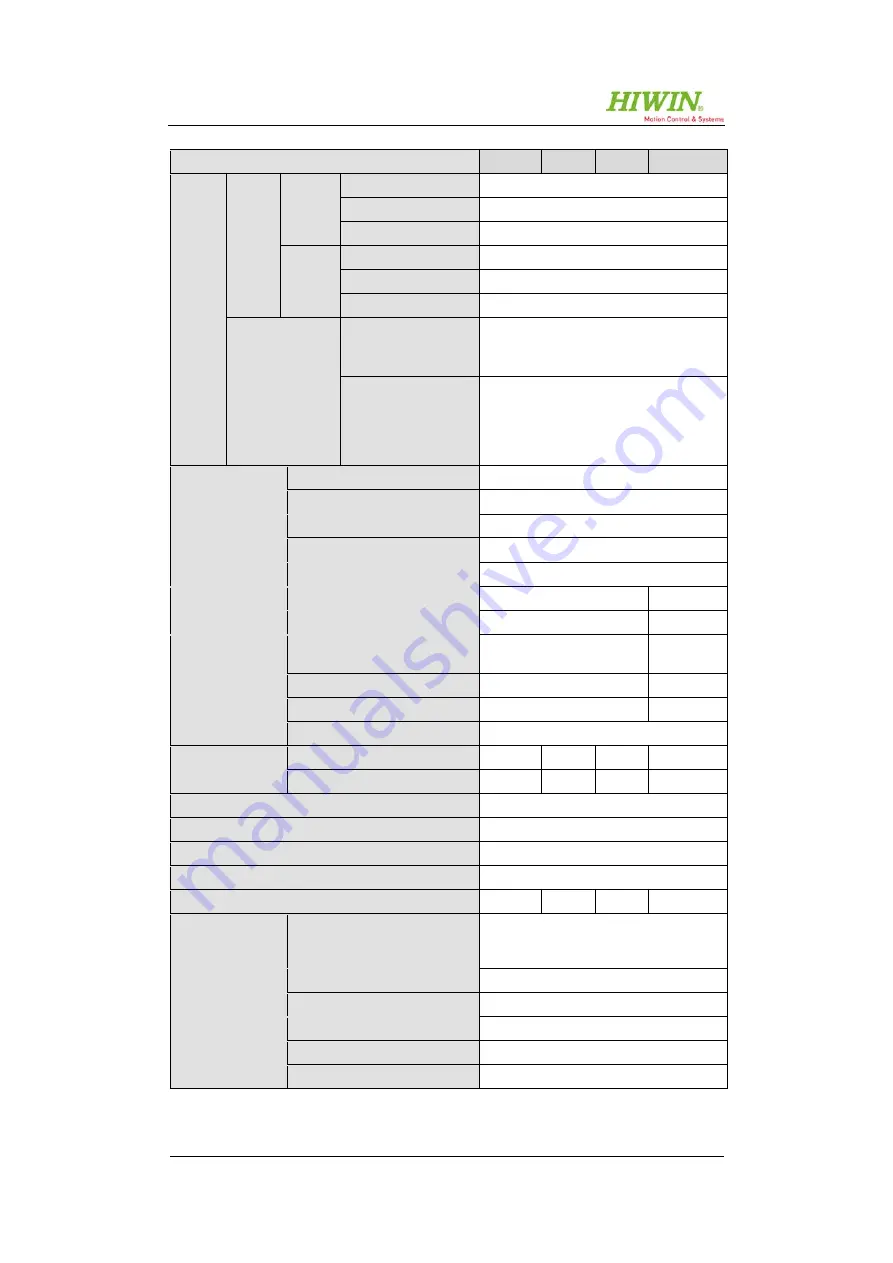
HIWIN D1-N servo drive amplifier
09
18
36
90
N
omi
na
l v
al
ue
inp
ut
s
Tor
qu
e r
eg
ul
at
ion
Analogue
Input resistance
10
k
Ω
Input voltage
±10
VDC
Resolution
12 bit
Digital
Function
Step/direction, CW/CCW
PWM frequency
Min. 36.5
kHz, max. 100
kHz
Min. pulse duration
220
ns
EtherCAT
Functions
PDO communication (flexible mapping)
SDO communication
Distributed clocks
CiA402 Modes
Profile Position Mode (1)
Profile Velocity Mode (2)
Cyclic Synchronous Position Mode (8)
Cyclic Synchronous Velocity Mode (9)
Homing (6)
Inputs / outputs
which can be pa-
rameterised
10 digital inputs
Function can be freely selected
3 digital outputs
Function can be freely selected
Brake control
24
VDC, max. 1
A
Capture input
Reaction time <7
ns (Input PCP)
CAM output
Reaction time <7
ns (Output PT), 5
VDC
DC-Bus
Overvoltage
+HV >404
VDC
+HV >800
VDC
Undervoltage
+HV <60
VDC
+HV <158
VDC
Brake
resistor
Connection
Internal (50
Ω
/150
W)
and/or external
External only
Activation threshold
+HV >390
VDC
+HV >735
VDC
Deactivation threshold
+HV <380
VDC
+HV <695
VDC
Tolerance
±5
%
Cooling
External heatsink
No
No
Yes
Yes
Integrated fan
No
Yes
Yes
Yes
EMC filter
No EMC filter integrated
Safety function
STO (Safe Torque Off)
User interface
LCD
Parameterisation interface
USB 2.0
Weight
2,05
kg
2,2
kg
3
kg
5,8
kg
Ambient conditions
Ambient temperature
Operation: 0 to 50
°C (above 50
°C with air
conditioning)
Transport / storage: –25 to 65
°C
Air humidity
0 to 90
%, non-condensing
Operating altitude
Up to 1000
m above sea level
Vibrations
1
G (10 to 500
Hz)
Protection class
IP20
Pollution
Degree 2
Table 3.3: Technical specification







































































