


























34
C22UE001-2004
2.5
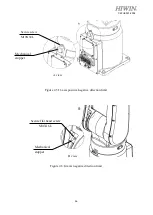
Wrist Moment Diagram
The load capacity of the robot is not only limited by the weight of the load, but also
limited by the center of gravity of the load. Figure 2-4 shows allowable center of gravity of the
load when the robot is loaded 1~5kg.
Figure 2-4 Wrist moment diagram
The transportable load weight will be greatly related to the
motion posture and speed of the robot. Therefore, over-current
could happen even if the load is under the allowable range.
When this situation occurs, the posture and speed of robot
must be changed.
1kg
2kg
3kg
4kg
5kg







































































