




























38
C22UE001-2004
B
A
3.
Equipment Mounting Interface
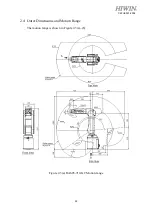
3.1
Mounting Surface for End Effector
The mounting surface for end effector on the wrist end is shown in Figure 3-1.
Figure 3-1 End effector Interface
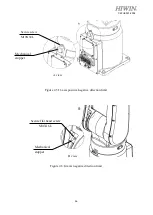
3.2
Pneumatic Interface
The pneumatic holes (AIR IN & AIR OUT) are installed on the rear of J1 as shown in Figure
3-2, and the outer diameter of the air tube in the robot is
ψ
4mm. The secure holes for the nozzle
are M5×0.8P.
Figure 3-2 RA605-GC Pneumatic interface
Code
Name
Label
A
Air in/out
socket
B
Air in/out
socket







































































