




























14
C08UE001-1912
when using end effector, the associated hazards
must be handled by the system integrator in
accordance with the related standards.0
3.5 Pneumatic, Hydraulic System
When using the pneumatic or hydraulic system,
the gripped workpiece may fall due to insufficient
pressure or gravity.
The pneumatic or hydraulic system must be
equipped with the relief valve, so that it can be
applied in an emergency.
More attention should be paid to the pressure
remained in the pneumatic systems after the
power is disconnected.
The internal pressure must be released before the
pneumatic systems are maintained.
More attention should be paid to the pressure in
the pneumatic system as it is several times more
than the atmosphere pressure.
3.6 Emergency Stop Switch
The robot or other control component should have
at least one device for immediate halt, such as an
emergency stop switch.
The emergency stop button must be installed in an
Summary of Contents for RA620-1621
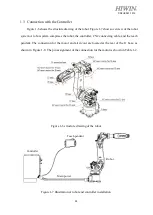
Page 1: ...www hiwin tw User Manual Articulated Robot RA620 Original Instruction...
Page 35: ...34 C08UE001 1912 Figure 2 3 Outer dimension and motion range RA620 1621 J1 0 deg...
Page 37: ...36 C08UE001 1912 Figure 2 5 Wrist load diagram RA620 1621...
Page 54: ...53 C08UE001 1912 Table 5 3 Inspection schedule...





























































