




























45
C08UE001-1912
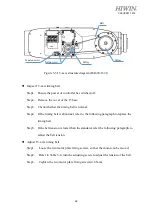
Figure 4-2 Illustration of J1-axis zero position setting
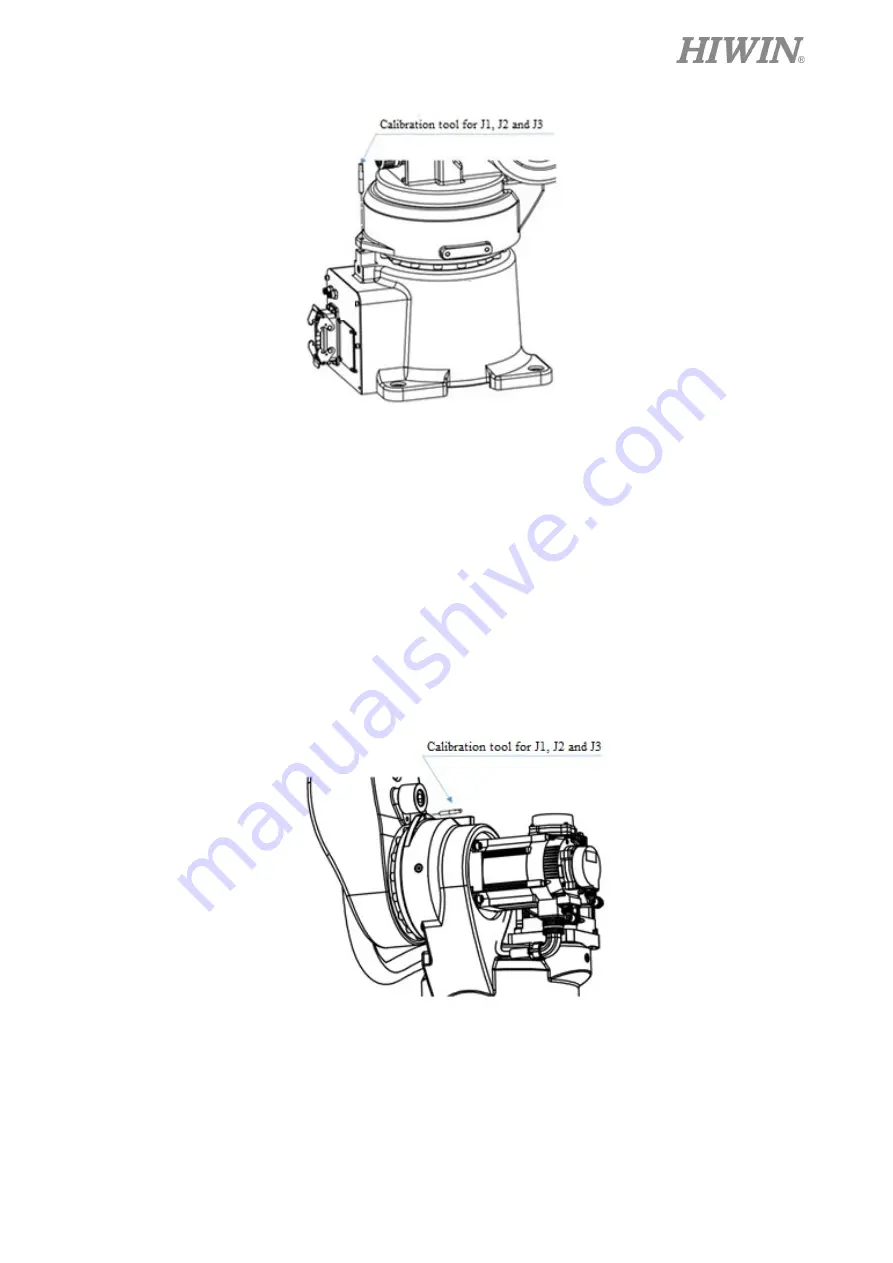
J2-axis zero position setting
Step1: Operate J2 at low speed to align the pinhole of J3 base with the pinhole of J1 base.
Step2: Insert the calibration tool for J1~3 to the pinhole to calibrate zero position.
Step3: Complete the calibration and remove the calibration tool.
Step4: Clear encoder by HRSS.
Step5: Resetting zero position of J2-axis is completed.
Figure 4-3 Illustration of J2-axis zero position setting
Summary of Contents for RA620-1621
Page 1: ...www hiwin tw User Manual Articulated Robot RA620 Original Instruction...
Page 35: ...34 C08UE001 1912 Figure 2 3 Outer dimension and motion range RA620 1621 J1 0 deg...
Page 37: ...36 C08UE001 1912 Figure 2 5 Wrist load diagram RA620 1621...
Page 54: ...53 C08UE001 1912 Table 5 3 Inspection schedule...
































































