






















54
C08UE001-1912
5.2
Maintenance
5.2.1 Backup Batteries Replacement
The absolute encoder of the motor is used to record the position of the robot. When the
controller power turn off, the position data of each axis is preserved by the backup batteries. The
batteries are installed when the robot is shipped from the factory. If the batteries are in use, the
annual change of batteries is needed. The service life of the batteries depends on the operating
conditions of the robot. In order to avoid the loss of position data, the batteries need to be
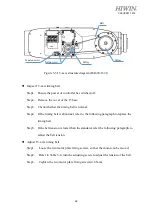
changed by the user periodically. The procedure for replacing the batteries of the robot is shown
in Figure 5-1. The procedures are described as below.
Step1.
Ensure the robot and controller are connected with the cables.
Step2.
Keep the power on. Press the emergency stop button to prohibit the movement of the
robot motion.
Step3.
The battery box is located in the rear of the J1 base. Please remove the battery cover.
Step4.
Replace the battery one by one. If all batteries are removed in the same time, the position
data will be lost. Therefore, please resetting the robot to the zero position.
Step5.
After replacing the battery, ensure to install the battery cover.
All batteries should be changed simultaneously. If
the old batteries are included, the service life of the
batteries may be reduced.
Summary of Contents for RA620-1621
Page 1: ...www hiwin tw User Manual Articulated Robot RA620 Original Instruction...
Page 35: ...34 C08UE001 1912 Figure 2 3 Outer dimension and motion range RA620 1621 J1 0 deg...
Page 37: ...36 C08UE001 1912 Figure 2 5 Wrist load diagram RA620 1621...
Page 54: ...53 C08UE001 1912 Table 5 3 Inspection schedule...





































































