





















56
C08UE001-1912
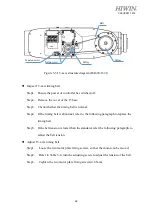
Measuring methods for the belt by using fingers or tools are shown in Figure 5-2. The sonic tension
meter is used to measure the belt tension. The specifications and standard tension of belt are shown
in Table 5-4.
Figure 5-2 Measure belt tension
Table 5-4 Belt specifications
When replacing the belt, the robot system origin may deviate.
In this case, the position data must be rechecked if the origin
is offset. Please refer to section 4.1 for Zero-point setting.
Model
Axis
Belt type
Width(mm) Span(mm) Tension(N)
RA620-1739
J5
505-5GT-9
9
188.6
55~61
J6
505-5GT-9
9
188.6
55~61
RA620-1621
J5
540-5GT-9
9
188.6
55~61
J6
540-5GT-9
9
188.6
55~61
Summary of Contents for RA620-1621
Page 1: ...www hiwin tw User Manual Articulated Robot RA620 Original Instruction...
Page 35: ...34 C08UE001 1912 Figure 2 3 Outer dimension and motion range RA620 1621 J1 0 deg...
Page 37: ...36 C08UE001 1912 Figure 2 5 Wrist load diagram RA620 1621...
Page 54: ...53 C08UE001 1912 Table 5 3 Inspection schedule...







































































