




























21
C07UE001-1804
2-4
Specification Table
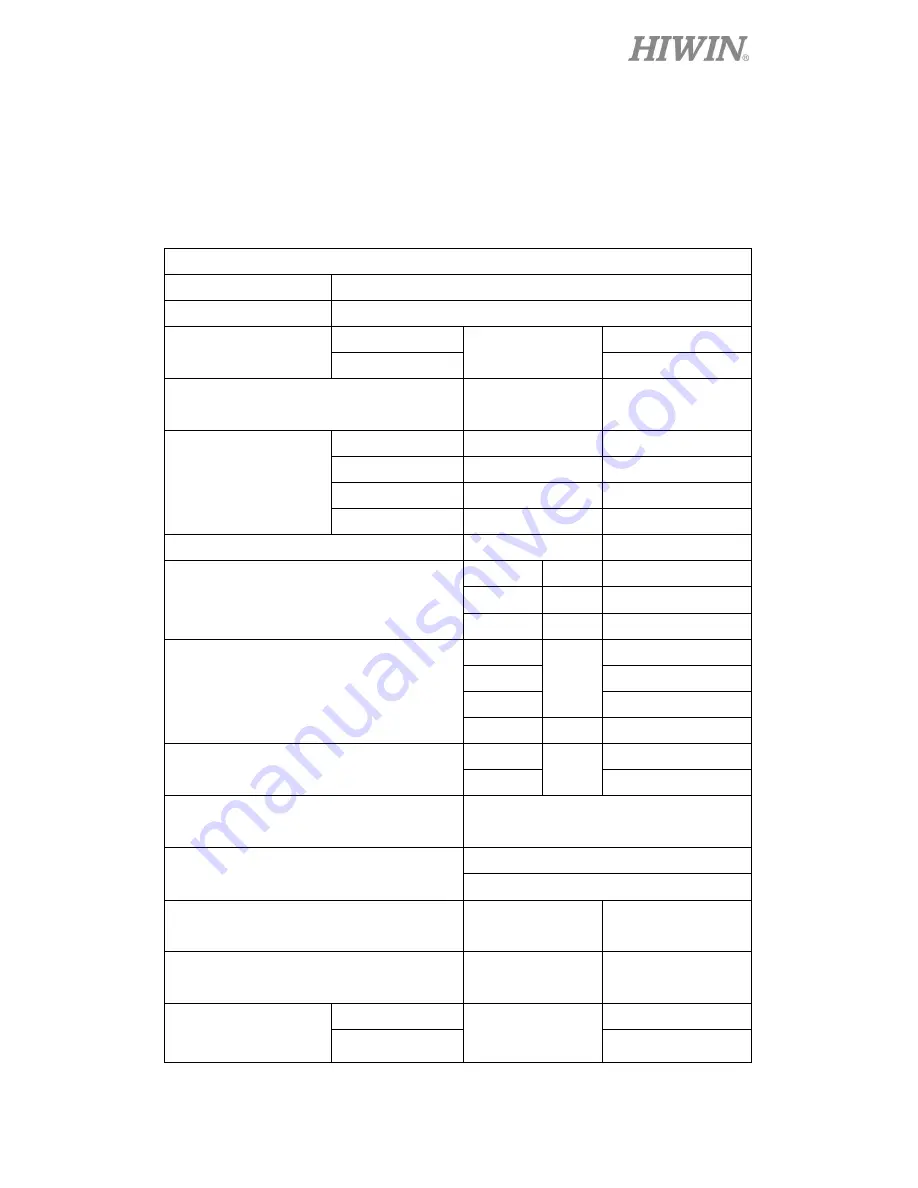
This manual takes RS403-400-150-N for example, and describes the
performance and the specification of the robot, as shown in the following table.
Table 2-1 Specification Table for RS403-400-150-N
Specification Table
Model Number
RS403-400-150-N
Degree of Freedom
4
Payload
Rated
kg
1
Maximum
3
Maximum arm length
(Arm A, and Arm B)
mm
400
Maximum motion
range
J1
deg
±128
J2
deg
±130
J3
deg
±360
J4
mm
150
Cycle time
sec
0.42
Repeatability
J1+J2
mm
±0.01
J3
deg
±0.01
J4
mm
±0.01
Maximum axial speed
J1
deg/sec
600
J2
600
J3
2000
J4
mm/sec
890
Permissible rotation inertia
Rated
kg-m
2
0.005
Maximum
0.05
Arm I/O
3 Output Point
3 Input Point
Pneumatic connector quantity/dimension
Ø 4 x 2
Ø 6 x 1
Arm weight (not including the control
panel)
kg
17
Input power
V/A
AC 220V
1P 50 / 60 Hz
Maximum pneumatic
input
Input pressure
kg / cm
2
7
Vacuum pressure
1







































































