


























90
Pn No.
Size
Name
Setting range
Setting Unit
Factory
setting
Available
time
Catego
ry
Rema
rks
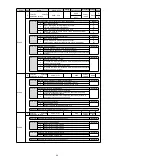
Pn139
2 Automatic Gain Switching
Class Switch 1
0000
~
0052
-
0000
Effective
immediately
Adjust
ment
n.
X
Gain switching selector switch
0
Manual gain switching
The gain is manually switched by the G_SEL of the servo command output signal
(SVCMD_IO).
1
Appointment Parameters (Do Not Set)
2
Automatic switching mode 1
When the switching condition A is satisfied, it is automatically switched from the first
gain to the second gain.
When the switching condition A fails, it is automatically switched from the second gain
to the first gain.
n.
X
Switching conditiona
0
Location Complete Output (/COIN) Signal ON
1
Location Complete Output (/COIN) Signal OFF
2
Position nearby output (/NEAR) signal ON
3
Position nearby output (/NEAR) signal OFF
4
Position command filter output =0 and position command input OFF
5
Position command input ON
n.□X
Appointment parameters (do not change it)
n.X
Appointment parameters (do not change it)
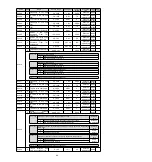
Pn13D
2 Current gain value
100
~
2000
1%
2000
Effective
immediately
Adjust
ment
Pn140
2 Model Tracking Control
Class Switch
0000
~
1121
-
0100
Effective
immediately
Adjust
ment
-
n.
X Model tracking control selection
Remarks
0
Model tracking control is not used.
1
Use model tracking control.
n.
X
Vibration suppression selection
Remarks `
0
Vibration suppression is not performed.
1
Add vibration suppression function to specific frequency.
2
Add vibration suppression function to 2 different frequencies.
n.
X
Appointment parameters (do not change it)
Remarks
0
The vibration suppression function is not automatically adjusted in the
process of performing automatic adjustment (without upper command),
automatic adjustment (with upper command) and custom adjustment.
1
The vibration suppression function is automatically adjusted in the
process of performing automatic adjustment (without upper command),
automatic adjustment (with upper command) and custom adjustment.
n.X
Speed Feed Forward (VFF)/ Torque Feed Forward Selection
Remarks
0
Model tracking control and speed/torque feedforward are not used at the
same time.
1
Model tracking control and speed/torque feedforward are used
simultaneously.
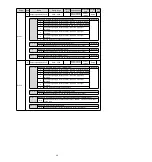
Pn141
2 Model tracking control gain
10
~
20000
0.1/s
500
Effective
immediately
Adjust
ment
Pn142
2 Model tracking control gain
correction
500
~
2000
0.1%
1000
Effective
immediately
Adjust
ment
Pn143
2 Model tracking control bias
( forward rotation direction)
0
~
10000
0.1%
1000
Effective
immediately
Adjust
ment
Pn144
2 Model tracking control bias
(Reverse rotation direction)
0
~
10000
0.1%
1000
Effective
immediately
Adjust
ment
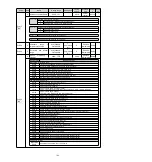
Pn145
2 Vibration suppression 1
frequency A
10
~
2500
0.1 Hz
500
Effective
immediately
Adjust
ment
Pn146
2 Vibration suppression 1
frequency B
10
~
2500
0.1 Hz
700
Effective
immediately
Adjust
ment
Pn147
2
Feedforward
compensation of model
tracking control speed
0
~
10000
0.1%
1000
Effective
immediately
Adjust
ment
Pn148
2 Model 2 tracking control
gain
10
~
20000
0.1/s
500
Effective
immediately
Adjust
ment
Pn149
2 Model 2 tracking control
gain correction
500
~
2000
0.1%
1000
Effective
immediately
Adjust
ment
Pn14A
2 Vibration suppression 2
frequency
10
~
2000
0.1 Hz
800
Effective
immediately
Adjust
ment
Pn14B
2 Vibration suppression 2
correction
10
~
1000
1%
100
Effective
immediately
Adjust
ment







































































