

Prior to installing and setting up your new Super Multi-Rotor Controller, it’s important that you
read, understand and abide by the cautions and warnings in this section. Failure to follow this
advice may result in damage to the Super Multi-Rotor Controller, your model’s other electronics or
even injury to yourself or others.
• Remove the rotor blades from your model prior to the initial setup and calibration process. This
will ensure there can be no injury or other damage should the motors power up unexpectedly.
Only after the setup and calibration process is complete and you’re fully aware of how the Super
Multi-Rotor Controller locks and unlocks the motors, should you install the rotor blades.
• Prior to connecting the Super Multi-Rotor Controller, your transmitter must be set up correctly and
the throttle range of each of your ESCs must be calibrated. Do not make any connections to the
Super Multi-Rotor Controller until told to in this User’s Guide.
• The Super Multi-Rotor Controller supports the use of different receiver types, however, only one
receiver type should be used at any one time.
• For the best performance, the Super Multi-Rotor Controller should be mounted on a flat, level
surface directly in the center of your model. In addition, the front of the Super Multi-Rotor Controller
should be toward the front of your model. Use the double-sided foam tape included to provide
some measure of vibration isolation. Do not hard-mount the Super Multi-Rotor Controller.
• The Super Flight Controller is compatible with PWM (Pulse Width Modulation) ESCs only. Do not
use any other type of ESC (not common among hobby grade ESCs). In addition, your ESC’s
Governor Mode and Brake Mode (if supported) should be disabled.
• Increasing the gain too much can make your model very difficult to control and isn’t recommended.
• When the motors are unlocked, they will spin up at low throttle to stabilize your model in preparation
for flight. Be aware of this at all times to help prevent any chance of injury.
introduction
Thank you for purchasing the Hobby People Super Multi-Rotor Controller. The Super
Multi-Rotor Controller is small and lightweight, and designed for use with 250 to 600 size
4-axis and 6-axis multi-copters. It supports configurations for four different flight modes
and four different receiver types, and features a built-in auto-stabilization function and
acceleration sensor for stable, controlled flight. The Super Multi-Rotor Controller is easy
to set up and calibrate and features an adjustable gain dial to fine-tune the sensitivity of your model’s
flight controls. The Super Multi-Rotor Controller includes double-sided foam mounting tape, two
pre-wired flight control adapters and a gain adjustment tool.
• Small and Lightweight - Designed for Use with 250 to 600 Size 4-Axis and 6-Axis Multi-Copters
• Built-In Auto-Stabilization Function and Acceleration Sensor for Stable, Controlled Flight
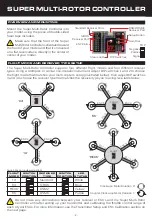
• Supports Four Different Flight Modes: ‘X4’, ‘+4’, ‘X6’ and ‘HEX6’
• Compatible with Standard, S-Bus, DSM2 and DSMX Receivers
• Adjustable Gain Dial to Fine-Tune Flight Sensitivity
• Easy to Set Up and Calibrate
features
specifications
cautions and warnings
-1-
• Operating Voltage Range: 3.6V to 8.4V
• Operating Current: 60mA
• Processor: 32-Bit ARM
®
• Output Rate: 360Hz
• Dimensions: 1.69 x 1.14 x 0.51” (43 x 29 x 13mm)
• Weight: 0.31 Ounces (9g)
super multi-rotor controller