
Warnings
CAUTIONS
Thank you for purchasing this product! Brushless power systems can be very dangerous.
Any improper use may cause personal injury and damage to the product and related devices.
We strongly recommend reading through this user manual before use. Because we have no
control over the use, installation, or maintenance of this product, no liability may be assumed
for any damage or losses resulting from the use of the product. We do not assume
responsibility for any losses caused by unauthorized modifications to our product.
We, HOBBYWING, are only responsible for our product cost and nothing else as result of
using our product.
ATTENTION
01
03
Specifications
02
Features
04
User Guide
05
06
Normal Start-up Process and Protections
Trouble shooting
Model
Con. Current
20A
12A
Peak Current (10s)
25A
18A
BEC
5.3V & 12V, 3A
5V , 1A
LiPo
3-4S
1-4S
Weight
24.5g
8g
Size
54 x 36 x 7mm
38.1 x 37.9 x 5.3mm
XRotor Micro 20A 4IN1
XRotor Micro 12A 4IN1
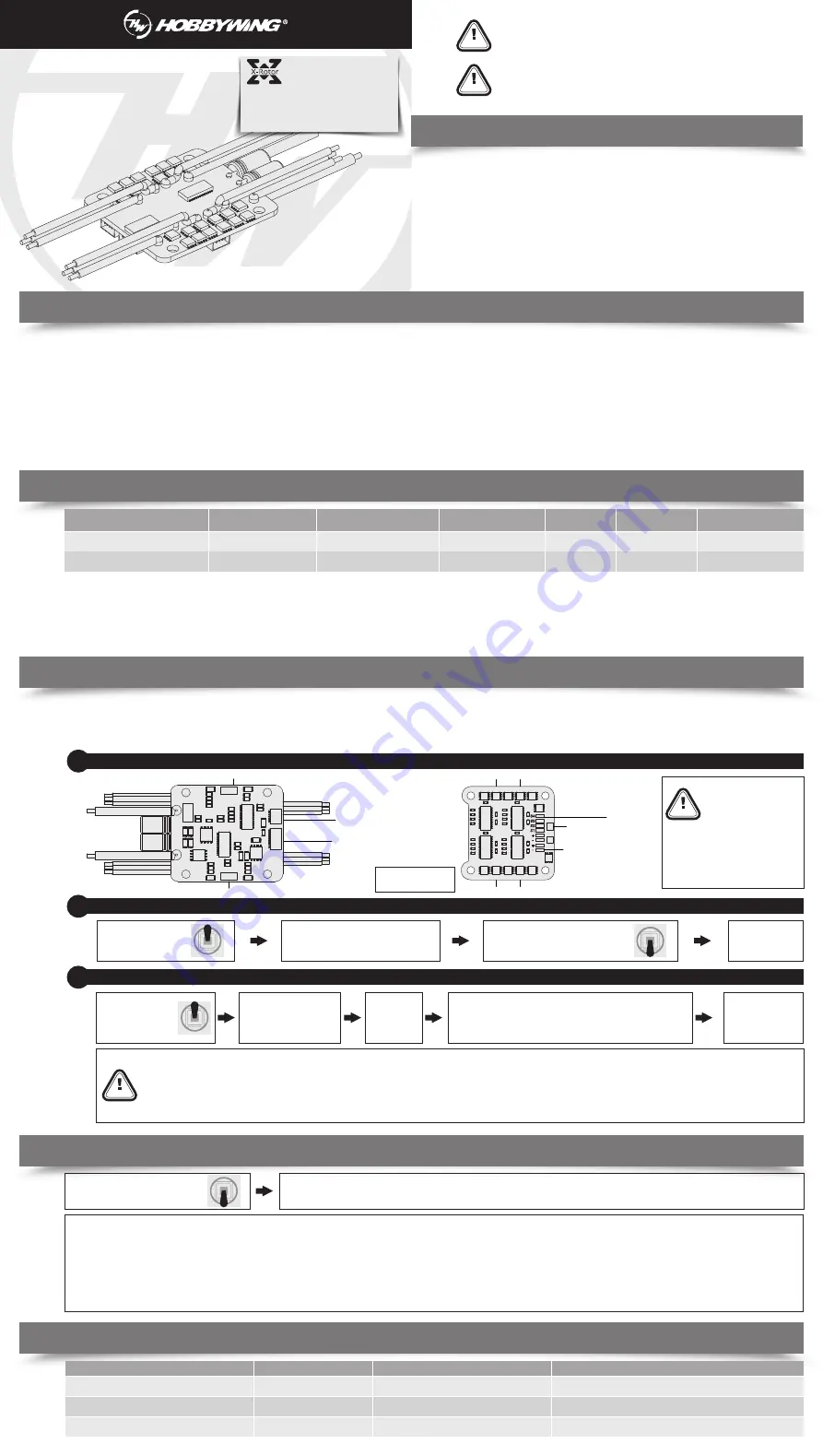
Connections
1
Throttle Calibration
2
Parameter Adjustment
3
Connect the receiver to the battery, ensure the
transmitter and receiver are well bound, and
then turn on the ESC.
After the motor emits two short
“beep-beep”, move the throttle stick to the
bottom position within 3 seconds
Throttle Calibration
completed
This is an extremely powerful
brushless motor system. We
strongly recommend removing
your propellers for your own
safety and the safety of those
around you before performing
calibration and programming
functions with this system.
IMPORTANT
Turn on the transmitter, and
move the throttle stick to
the top position.
Connect the receiver to the
battery, ensure the transmitter
and receiver are well bound,
and then turn on the ESC.
The motor will
beep different
tones
"Beep-B-" indicates "throttle calibration", "Beep-B-B-" indicates "motor
direction adjustment", and "Beep-B-B-B-" indicates "setting the braking
function". Move the throttle stick to the bottom position in 3 seconds after
you hear the corresponding beeps can complete throttle calibration or motor
direction adjustment or setting the braking function. .
Turn on the transmitter,
and move the throttle
stick to the top position.
Disconnect the ESC
from the battery after
the adjustment
completes.
• The motor direction is set to CW by default; move the throttle stick to the bottom position in 3 seconds after the motor emits three short beeps will change the direction to CCW. Next time, move the throttle
stick to the bottom position in 3 seconds after you hear the three short beeps will change the direction back to CW. (That’s every time you move the throttle stick to bottom position in 3 seconds after the three
short beeps, the motor direction will be different from the last time.)
• The braking function is set to "Brake On" by default, move the throttle stick to the bottom position after you hear“Beep-B-B-B-” can set this item to “Brake Off”. Next time, you move the throttle stick to the
bottom position after the four short beeps will change the setting back to “Brake On”. (That’s every time you move the throttle stick to the bottom postion after the four short beeps, the setting will be different
from the last time.) When setting to “Brake Off”, the motor will keep spinning for a while (or won’t stop spinning immediately) due to inertia after the throttle stick is moved to the bottom position, and the
braking effect won’t disappear during the operation.
Start-up Protection:
the ESC will shut down the motor if it fails to start the motor normally within 2 seconds by increasing the throttle value. In this case, you need to move the transmitter throttle stick back to the bottom position and
restart the motor. (Possible causes of this problem: poor connection/ disconnection between the ESC and motor wires, propellers are blocked, etc.)
Over-load Protection:
the ESC will cut off the power/output when the load suddenly increases to a very high value. Normal operation will not resume until the throttle stick is moved back to the bottom position.
The ESC will automatically attempt to restart when the motor and the ESC are out of sync.
Throttle Signal Loss Protection:
when the ESC detects loss of signal for over 0.25 second, it will cut off the output immediately to avoid an even greater loss which may be caused by the continuous high-speed rotation of propellers or
rotor blades. The ESC will resume the corresponding output after normal signals are received.
Motor Lock-up Protection:
the ESC will cut off its output to the motor immediately when it detects the motor is locked up, and then try to restart the motor. It will cut off the output completely and stop attempting to restart the motor
if the motor is locked up for over 2 seconds. In this condition, you can only restart the ESC and resume its output through pulling the throttle stick to the bottom position first and then pushing the stick upward.
IMPORTANT
Turn on the transmitter and move the
throttle stick to the bottom position.
The motor will emit a long “beep----”1 second after the system is connected to the battery indicating the ESC is armed and the multi-rotor is ready to go.
Trouble
The ESC was unable to start the motor after
it was powered on.
The ESC was unable to start the motor after
it was powered on.
The ESC was unable to start the motor after it
was powered on, or the throttle calibration failed.
Warning Tone
“Beep beep beep…”
(The motor beeps rapidly)
“Beep, beep, beep…”
(Time interval is 2 seconds)
“Beep beep beep…”
(The motor beeps rapidly)
Possible Cause
The throttle stick is not at the bottom position.
No output signal from the throttle
channel on the receiver.
The entire throttle range is too narrow.
Solution
Move the throttle stick to the bottom position or
re-calibrate the throttle range.
Check if the transmitter and receiver are well bound, the throttle
cable has been correctly plugged into the TH channel on the receiver.
Refer to the manual of your transmitter and
re-calibrate the throttle range.
USER MANUAL
Multi-Rotor
XRotor Micro 12A/20A 4IN1
Brushless Electronic Speed Controller
• Read through the manuals of all power devices and aircraft and ensure the power configuration is
rational before using this unit, as incorrect configuration may cause the ESC to overload and be damaged.
• Ensure all wires and connections must be well insulated before connecting the ESC to related devices,
as short circuit will damage your ESC. And ensure all devices are well connected, (please use a soldering
iron with enough power to solder all input/output wires and connectors if necessary,) as poor connection
may cause your aircraft to lose control or other unpredictable issues such as damage to the device.
• Do not use this unit in the extremely hot weather or continue to use it when it gets really hot
(around 105
℃
/221
℉
). Because high temperature will cause the ESC to work abnormally or even damage it.
• Users must always disconnect the batteries after use as the current on the ESC is consuming continuously
if it`s connected to the batteries (even if the ESC is turned off). The battery will completely be discharged and
may result in damage to the battery or ESC when it is connected for a long period of time. This will not be
covered under warranty.
• Well-designed core program with all parameters adjusted to the optimum saves all the trouble of parameter adjustment.
• Smaller size & lighter weight for smaller-size multirotors/drones.
• Multiple output ports for powering different accessories such as picture transmission module, camera and LED lights and etc.
• Amp/Volt monitoring port for flight contr oller monitoring Amp/Volt in real time (the FC needs to support time function , XRotor 12A 4IN1 Micro without this).
• One-Shot125 signal-receiving mode with a real-time signal frequency of up to 3800Hz supported.
• One-Shot42 signal-receiving mode supported.
• MultiShot signal-receiving mode supported.
• DEO (Driving Efficiency Optimization) technology significantly reduces the ESC temperature, improves the throttle response, and strengthens the stability and flexibility of multi-rotors. (
Note:
this ESC is quite suitable for QAVs.)
• Active braking (brought by DEO technology) for quicker deceleration when reducing the throttle amount.
• Motor direction is switchable between CW and CCW through the transmitter.
• Braking function allows the motors to quickly stop spinning when the throttle stick is moved to the bottom position.
• Compatible with various flight controllers and supports a PWM signal frequency of up to 621Hz in “Regular” signal-receiving mode.
• Intelligent motor lock-up protection for protecting the motor and the ESC.
• After connected to the flight system, the ESC will automatically detect the input throttle signals every time after it is powered on and then execute the corresponding signal-receiving mode. Users cannot change the signal-receiving mode
during the powering-up process and the flight. If necessary, they need to change the mode on the flight controller (under the condition that the flight controller supports the “One-Shot125” or “One-Shot42” or “MultiShot”
signal-receiving mode) first, and then disconnect and re-connect the battery, then the ESC will complete the mode change.
• If users’flight controllers support throttle calibration, HOBBYWING recommend calibrating the throttle range when they start to use a new XRotor brushless ESC; if not, it is fine to use the default. And they can use the transmitter to
calibrate the throttle range if a severe “out of sync” issue happens to the motor(s).
20161227
Notes:
• This XRotor ESC supports the PWM signal frequencies of 50 to 621Hz in regular signal-receiving mode, the throttle high level ranges from 700 to 2200µs (1100~1900µs by default). And the ESC supports throttle calibration.
• This XRotor ESC supports the signal frequency of 50 to 3800Hz in One-Shot125 signal-receiving mode, the throttle high level ranges from 110 to 270µs (125~250µs by default). And the ESC supports throttle calibration.
• This XRotor ESC supports the One-Shot42 signal-receiving mode, the throttle high level ranges from 35 to 90µs (42~81µs by default). And the ESC supports throttle calibration.
• This XRotor ESC supports the MultiShot signal-receiving mode, the throttle high level ranges from 3 to 30µs (5~25µs by default). And the ESC supports throttle calibration.
• Users need to re-calibrate the throttle range after they change the (throttle) signal frequency.
• Amp/Volt monitoring port: APM standar d, the voltage is 1/10 of the battery voltage, the curr ent is 50mv/A, and the tolerance is 5%.
(
XRotor 12A 4IN1 without tihs
)
M4
M2
S4
S3
S2
S1
+
-
+
-
M3
M1
Throttle signal input
S4-M4
S3-M3
S2-M2
S1-M1
+5V output
-
Input
-
+
+5V output
-
5.3V output
M3
M4
M2
M1
12V output
+5.3V
ADC_I
ADC_V
GND
Throttle signal input
S4-M4
S3-M3
S2-M2
S1-M1
+5.3V output
GND
Screw distributed from:
30.5x30.5mm







































































