


























Document No: C-61-00003-3
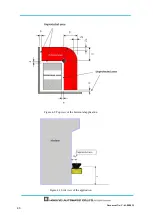
4.10 Area protection (Mobile, Horizontal, Autonomous Navigation)
UAM monitors both protection and warning zones and simultaneously transfers the measured data of
the surrounding through the Ethernet to the main control unit of AGV. Supplied data can be used for
autonomous route selection. For such systems, there is no need to install guidance means such as optical
beacons or electromagnetic
tapes on the floor. Refer to UAM-05LP communication protocol (C-64-00012)
for the Ethernet communication protocol.
Figure 4-18 Image of automatically operated AGV
4.11 Default Values
When configuring the device, default settings will be set is depending on the type of application selected
on the configuration software, UAM Project Designer. Table 4-1 shows the selected values.
Area will not be configured to any default value when selecting the applications. Configure the
appropriate area by calculating the safety distance or based on the risk assessment performed on the system.
Perform pre-operation tests on UAM to verify the correctness of the selected parameters.
Surrounding outline data
Summary of Contents for UAM-05LP
Page 1: ... Document No C 61 00003 3 ...
Page 104: ... Document No C 61 00003 3 Figure 7 33 b Function Figure7 33 c Area ...
Page 107: ... Document No C 61 00003 3 Figure 7 36 a Project report tab Figure 7 36 b Error report tab ...
Page 148: ... Document No C 61 00003 3 13 External dimension 13 1 UAM 05LP ...
Page 149: ... Document No C 61 00003 3 13 2 Base mounting bracket ...
Page 150: ... Document No C 61 00003 3 13 3 Rear mounting bracket ...
Page 151: ... Document No C 61 00003 3 13 4 Cover Protection Bracket ...
Page 152: ... Document No C 61 00003 3 14 EC Declaration of conformity ...
Page 153: ... Document No C 61 00003 3 ...






































































