





























Rev. 1.60
202
August 20, 2019
Rev. 1.60
203
August 20, 2019
BS66F340/BS66F350/BS66F360/BS66F370
Touch A/D Flash MCU with LED Driver
BS66F340/BS66F350/BS66F360/BS66F370
Touch A/D Flash MCU with LED Driver
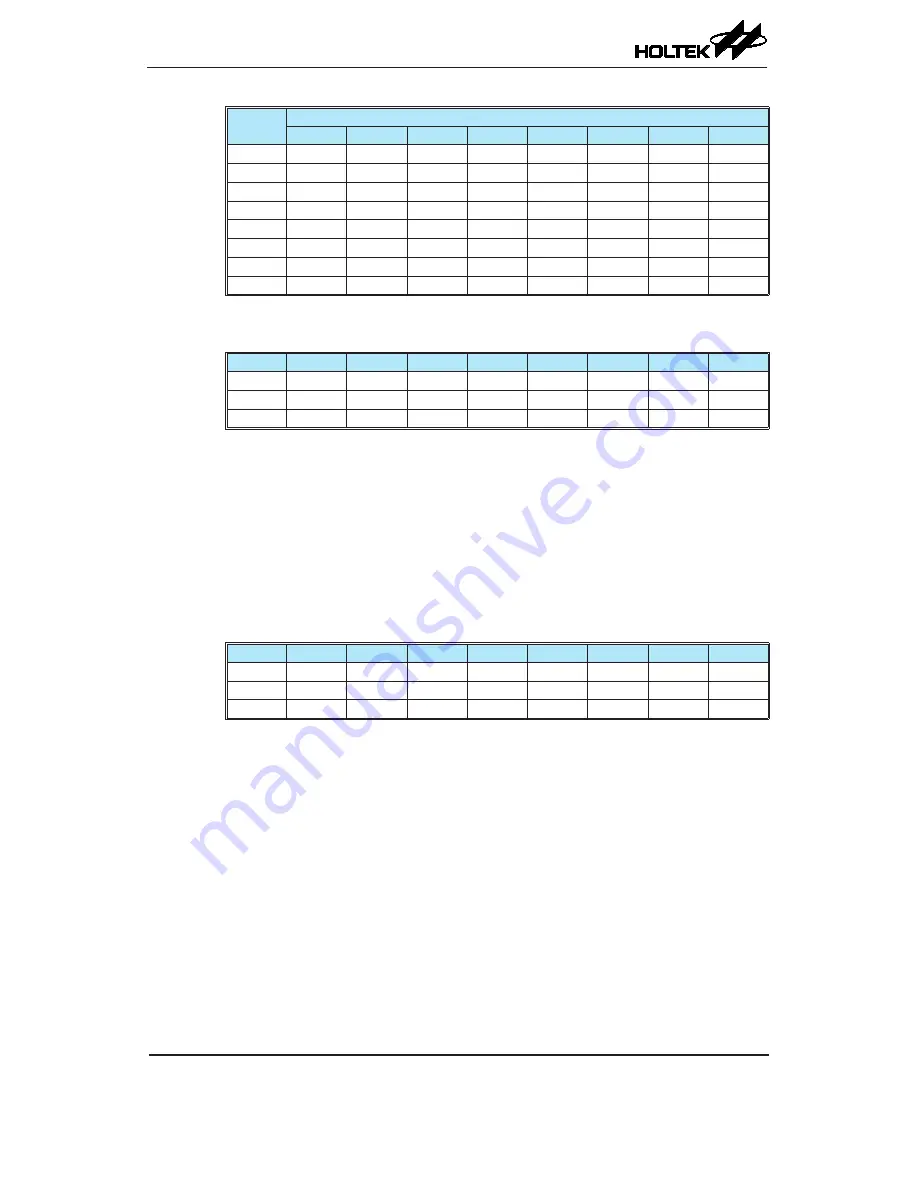
Register
Name
Bit
7
6
5
4
3
2
1
0
INTEG
—
—
—
—
INT1S1
INT1S0
INT0S1
INT0S0
INTC0
—
TKMF
INT1F
INT0F
TKME
INT1E
INT0E
EMI
INTC1
ADF
MF1F
MF0F
URF
ADE
MF1E
MF0E
URE
INTC2
MF3F
TB1F
TB0F
MF2F
MF3E
TB1E
TB0E
MF2E
MFI0
—
—
CTM0AF CTM0PF
—
—
CTM0AE CTM0PE
MFI1
STMAF
STMPF CTM1AF CTM1PF STMAE
STMPE CTM1AE CTM1PE
MFI2
—
SIMF
PTMAF
PTMPF
—
SIME
PTMAE
PTMPE
MFI3
—
—
DEF
LVF
—
—
DEE
LVE
Interrupt Registers List
• INTEG Register
Bit
7
6
5
4
3
2
1
0
Name
—
—
—
—
INT1S1
INT1S0
INT0S1
INT0S0
R/W
—
—
—
—
R/W
R/W
R/W
R/W
POR
—
—
—
—
0
0
0
0
Bit 7~4
Unimplemented, read as "0"
Bit 3~2
INT1S1~INT1S0
: Interrupt edge control for INT1 pin
00: Disable
01: Rising edge
10: Falling edge
11: Rising and falling edges
Bit 1~0
INT0S1~INT0S0
: Interrupt edge control for INT0 pin
00: Disable
01: Rising edge
10: Falling edge
11: Rising and falling edges
• INTC0 Register
Bit
7
6
5
4
3
2
1
0
Name
—
TKMF
INT1F
INT0F
TKME
INT1E
INT0E
EMI
R/W
—
R/W
R/W
R/W
R/W
R/W
R/W
R/W
POR
—
0
0
0
0
0
0
0
Bit 7
Unimplemented, read as "0"
Bit 6
TKMF
: Touch key interrupt request flag
0: No request
1: Interrupt request
Bit 5
INT1F
: INT1 interrupt request flag
0: No request
1: Interrupt request
Bit 4
INT0F
: INT0 interrupt request flag
0: No request
1: Interrupt request
Bit 3
TKME
: Touch key interrupt control
0: Disable
1: Enable
Bit 2
INT1E
: INT1 interrupt control
0: Disable
1: Enable
Bit 1
INT0E
: INT0 interrupt control
0: Disable
1: Enable







































































