





























Rev. 1.10
54
November 26, 2019
Rev. 1.10
55
November 26, 2019
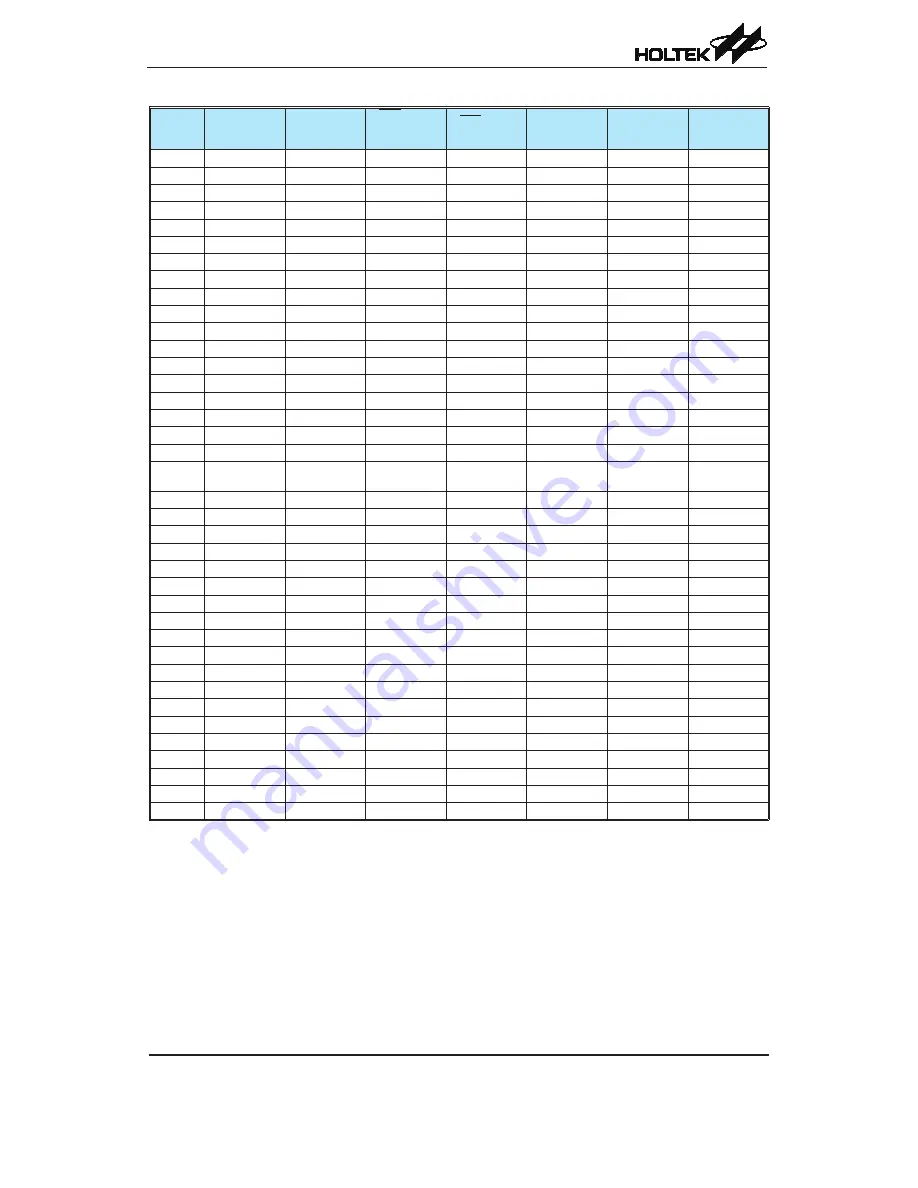
HT68FB240
USB Low Speed Flash MCU
Register
Reset
(Power On)
WDT Time-out
(Normal
Operation)
RES Reset
(Normal
Operation)
RES Reset
(HALT)
WDT Time-out
(HALT)*
USB-reset
(Normal)
USB-reset
(HALT)
TM1C0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 u u u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
TM1C1
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 u u u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
TM1DL
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 u u u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
TM1DH
- - - - - - 0 0 - - - - - - 0 0 - - - - - - 0 0 - - - - - - 0 0 - - - - - - u u - - - - - - 0 0 - - - - - - 0 0
TM1AL
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 u u u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
TM1AH
- - - - - - 0 0 - - - - - - 0 0 - - - - - - 0 0 - - - - - - 0 0 - - - - - - u u - - - - - - 0 0 - - - - - - 0 0
FRCR
- - - 0 - - - 0 - - - 0 - - - 0 - - - 0 - - - 0 - - - 0 - - - 0 - - - u - - - u - - - 0 - - - 0 - - - 0 - - - 0
FCR
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 u u u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
FARL
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u x x x x x x x x x x x x x x x x
FARH
- - - - x x x x - - - - x x x x - - - - x x x x - - - - x x x x - - - - u u u u - - - - x x x x - - - - x x x x
FD0L
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u x x x x x x x x x x x x x x x x
FD0H
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u x x x x x x x x x x x x x x x x
FD1L
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u x x x x x x x x x x x x x x x x
FD1H
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u x x x x x x x x x x x x x x x x
FD2L
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u x x x x x x x x x x x x x x x x
FD2H
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u x x x x x x x x x x x x x x x x
FD3L
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u x x x x x x x x x x x x x x x x
FD3H
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u x x x x x x x x x x x x x x x x
USB_
STAT
1 1 x x 0 0 0 - u u x x 0 0 u - u u x x 0 0 u - u u x x 0 0 u - u u x x 0 0 u - u u x x 0 0 u - u u x x 0 0 u -
UINT
- 0 0 0 - 0 0 0 - 0 0 0 - 0 0 0 - 0 0 0 - 0 0 0 - 0 0 0 - 0 0 0 - u u u - u u u - 0 0 0 - 0 0 0 - 0 0 0 - 0 0 0
USC
1 0 - 0 x 0 x x u u - u x u x x u u - u x u x x u u - u x u x x u u - u x u x x u u - u 0 1 0 0 u u - u 0 1 0 0
UCC
0 0 - 0 0 - x x u u - u u - x x u u - u u - x x u u - u u - x x u u - u u - u u u u - u u - 0 0 u u - u u - 0 0
AWR
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
STL
- x x x - x x x - x x x - x x x - x x x - x x x - x x x - x x x - x x x - x x x - 0 0 0 - 0 0 0 - 0 0 0 - 0 0 0
SIES
x x - x x x x x x x - x x x x x x x - x x x x x x x - x x x x x x x - x x x x x 0 0 - 0 0 0 0 0 0 0 - 0 0 0 0 0
MISC
x x x - - x x x x x x - - x x x x x x - - x x x x x x - - x x x x x x - - x x x 0 0 0 - - 0 0 0 0 0 0 - - 0 0 0
UFEN
- 0 0 - - 0 0 0 - u u - - u u u - 0 0 - - 0 0 0 - 0 0 - - 0 0 0 - u u - - u u u - 0 0 - - 0 0 0 - 0 0 - - 0 0 0
FIFO0
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
FIFO1
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
FIFO2
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x
URDCT
x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x x u u u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
PWMC
0 - - - - 0 0 0 0 - - - - 0 0 0 0 - - - - 0 0 0 0 - - - - 0 0 0 u - - - - u u u 0 - - - - 0 0 0 0 - - - - 0 0 0
PWM0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 u u u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
PWM1
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 u u u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
PWM2
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 u u u u u u u u 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
CTRL
0 - - - - x 0 0 0 - - - - x 0 0 0 - - - - x 0 0 0 - - - - x 0 0 u - - - - x u u 0 - - - - x 0 0 0 - - - - x 0 0
LVRC
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 u u u u u u u u 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
SYSC
1 - - - - - - - 1 - - - - - - - 1 - - - - - - - 1 - - - - - - - u - - - - - - - 1 - - - - - - - 1 - - - - - - -
Note: "u" stands for unchanged
"x" stands for unknown
"-" stands for unimplemented







































































