





























INDICADOR DE POSICIÓN DIGITAL (DITRON SERIE DL50)
HOLZMANN MASCHINEN GmbH www.holzmann-maschinen.at
91
ED400FD | ED400FDDIG
Ejemplo:
La longitud real de la mesa del eje X de la máquina es de 1000.000 mm y el valor visualizado en
el indicador es 999.880 mm. El coeficiente de corrección se calcula de la siguiente manera:
Coeficiente de corrección S = (1000.000 – 999.880) / (1000/1000) = 0.120 mm/m
Los pasos para la compensación lineal: En el modo de recuento, pulse
para introducir la
compensación lineal.
Pulse
para introducir la corrección del eje X.
Utilice las teclas de flecha
para ajustar el valor de compensación requerido.
Una vez ajustado, vuelva a pulsar la tecla
para guardar la compensación de errores y salir de
la función.
Proceda de igual manera para la compensación de errores de los ejes Y y Z.
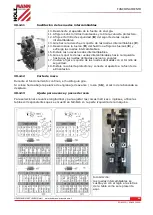
Interfaz para la compensación lineal:
Nota: Si se introduce el valor visualizado, el indicador no podrá cambiar a la función
"Compensación de errores lineales". Por lo tanto, ponga primero a cero el valor correspondiente
para poder acceder a la función.
36.4
Ajuste de los parámetros del sistema
El interruptor de alimentación se encuentra en la parte trasera del indicador. El indicador entra en
modo de autocomprobación una vez que se ha conectado y comprueba también que la pantalla
LED está en perfectas condiciones y que coinciden los ajustes de la resolución del sistema con los
del modelo.
El estado de autocomprobación permanece hasta que el indicador cambia al estado de
visualización normal.
Durante el proceso de autocomprobación, pulse una vez la tecla
. El indicador cambiará al
estado para el ajuste de los parámetros del sistema.
Aquí podrá llevar a cabo los siguientes ajustes de los parámetros del sistema:
1. Selección del tipo de codificador (codificador lineal o rotatorio)
2. Ajuste de la resolución (selección con resolución fija: 0.1 um, 0.2 um, 0.5 m, 1 um, 2 um,
2.5 um, 5 um y 10 um).
3. Ajuste del sentido de recuento (0: sentido positivo, 1: sentido negativo)
4. Ajuste del tipo de compensación (compensación lineal o no lineal)
5. Ajuste de los parámetros del codificador
6. Selección del tipo de indicador
36.4.1
Selección del tipo de codificador
L
INER
corresponde a un transductor de desplazamiento lineal que coincide con el eje, R
OTARY
corresponde a un codificador rotatorio que coincide con el eje.
Pulse la tecla
para modificar el tipo de codificador del eje X
Pulse la tecla
para modificar el tipo de codificador del eje Y
Pulse la tecla
para modificar el tipo de codificador del eje Z
Pulse
para acceder al paso 2 y pulse
para guardar el ajuste de los parámetros y salir.































































