




























Honeywell
Control Panel 29
7
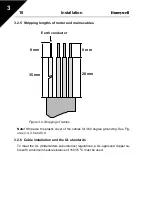
7.4 NAVIGATION ON THE SMARTDRIVE COMPACT CONTROL PANEL
This chapter provides you with information on navigating the menus on SmartDrive
Compact and editing the values of the parameters.
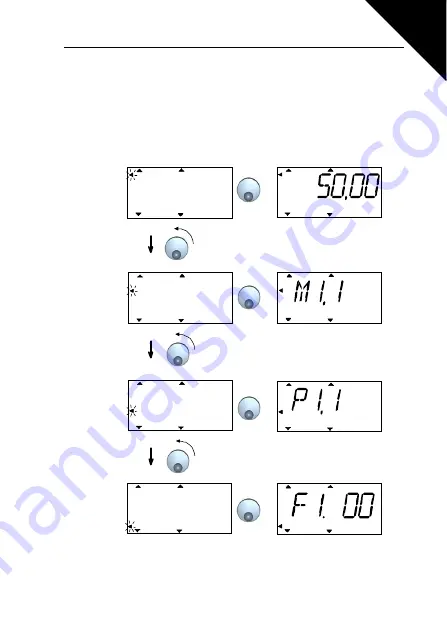
7.4.1 Main menu
The menu structure of SmartDrive Compact control software consists of a main
menu and several submenus. Navigation in the main menu is shown below:
Figure 7.2: The main menu of SmartDrive compact
Hz
Hz
FWD
REV
I/O KEYPAD
BUS
REF
MON
PAR
FLT
FAULT
ALARM
STOP
READY RUN
FWD
REV
I/O KEYPAD BUS
REF
PAR
FLT
FAULT
ALARM
STOP
READY RUN
MON
PUSH
FWD
REV
I/O KEYPAD
BUS
REF
PAR
FLT
FAULT
ALARM
STOP
READY RUN
MON
FWD
REV
I/O KEYPAD BUS
REF
PAR
FLT
FAULT
ALARM
STOP
READY RUN
MON
PUSH
FWD
REV
I/O KEYPAD BUS
REF
PAR
FLT
FAULT
ALARM
STOP
READY RUN
MON
FWD
REV
I/O KEYPAD
BUS
REF
PAR
FLT
FAULT
ALARM
STOP
READY RUN
MON
PUSH
FWD
REV
I/O KEYPAD
BUS
REF
PAR
FLT
FAULT
ALARM
STOP
READY RUN
MON
ROTATE
ROTATE
ROTATE
REFERENCE
MENU
Displays the
keypad reference
value
regardless of
the selected
control place.
MONITORING
MENU
In this menu
you can
browse the
monitoring
values.
PARAMETER
MENU
In this menu
you can
browse and
edit the
parameters.
FAULT MENU
Here you will
be able
to browse
through the
faults occurred.
PUSH
FWD
REV
I/O KEYPAD
BUS
REF
MON
PAR
FLT
FAULT
ALARM
STOP
READY RUN







































































