
























70
Parameter Descriptions
Honeywell
10
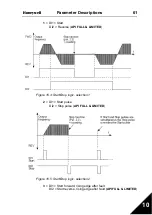
10.8 MOTOR THERMAL PROTECTION (PARAMETERS 9.7 - 9.10)
The motor thermal protection is to protect the motor from overheating. The Honey-
well drive is capable of supplying higher than nominal current to the motor. If the load
requires this high current there is a risk that the motor will be thermally overloaded.
This is the case especially at low frequencies. At low frequencies the cooling effect
of the motor is reduced as well as its capacity. If the motor is equipped with an exter-
nal fan the load reduction at low speeds is small.
The motor thermal protection is based on a calculated model and it uses the output
current of the drive to determine the load on the motor.
The motor thermal protection can be adjusted with parameters. The thermal current
I
T
specifies the load current above which the motor is overloaded. This current limit
is a function of the output frequency.
CAUTION! The calculated model does not protect
the motor if the airflow to the motor is reduced by
blocked air intake grill
NOTE! To comply with UL 508C requirements Motor
over-temperature sensing is required at installation
if the parameter is set to 0.
9.4
S
TALL
PROTECTION
0
= No response
1
= Alarm
2
= Fault, stop according to P2.3
The motor stall protection protects the motor from short time overload situa-
tions such as one caused by a stalled shaft. The stall current is I
nMotor
*1.3, stall
time 15 seconds and stall frequency limit 25Hz . If the current is higher than
the limit and output frequency is lower than the limit, the stall state is true and
the drive reacts according to this parameter. There is actually no real indica-
tion of the shaft rotation.
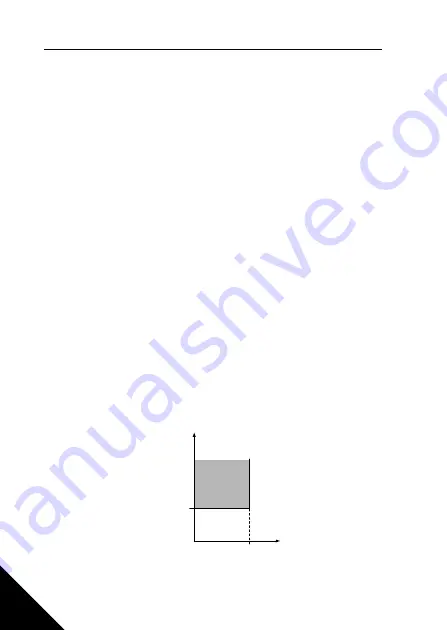
Figure 10.11: Stall characteristics
f
I
Inmotor *1.3
25Hz
Stall area







































































