











Honeywell
Industrial Measurement and Control
MU1I-6214
Honeywell-1100 Virginia Drive-Fort Washington, PA 19034
02/03
2
¾
3 - PID CONTROL TUNING
3.1 Determining the PID parameters using ON/OFF control
Ensure that the setpoint is at a safe level, to avoid any possible damage due to overshoot.
This method of tuning can be used to calculate the optimum PID parameters only if the process can tolerate large disturbances.
Procedure:
1. Enter a required setpoint value.
2. The UDC100 tuning parameters must be configured to achieve ON/OFF control.
Set the PB = 0.0% via the UDCs MMI or by means of the UDC100 CONFIGURATOR.
3. The UDC100 will cause the process to oscillate around the setpoint, the oscillation obtained will be dependent on the process characteristics.
Formula used to calculate optimum PID values:
a) Let "P" be the difference between the highest value of the first overshoot and the lowest value of the first undershoot expressed in °C.
b) Let "T" be the time period of the oscillations in seconds.
The PID control parameters should be then calculated using the table below and then entered into the UDC100.
Pb
P
Intervalo
100 %
=
∗
rSt
T s
=
rtE
T
6
s
=
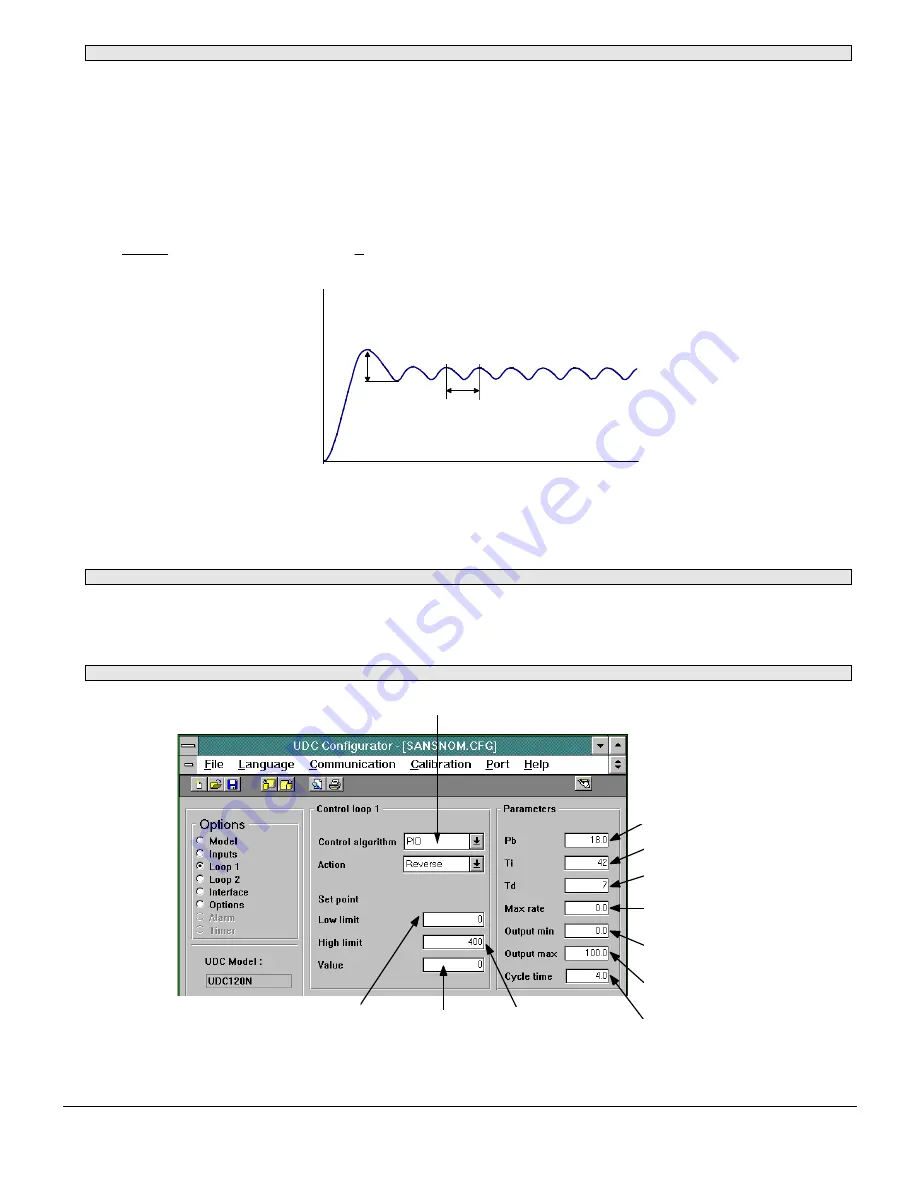
On/off control
Time (s)
P
ro
c
es
s va
ri
a
b
le
(
%
)
T
P
Determining PID parameters with ON/OFF control
3.2 Output
bias
The output bias parameter can be used to eliminate the offset between the PV and SP when the controller is in proportional and derivative mode.
NB:
The output bias (manual res et) parameter is accessible via the UDC100 MMI only when the integral time constant is set to 0.
¾
4 - MANUAL CONTROL MODE
Note:
Switching from PID to Man control and from Man control to PID is bumpless.
During the manual mode, the "Man" message flashes alternatively with the PV.
To adjust the output power, press the push button corresponding to the required loop, the last output value will be displayed, the value can then be adjusted using
the setpoint knob.
¾
5 - PC CONFIGURATOR DESCRIPTION
Choice of control
(default: ON/OFF)
Proportional Band
Integral time
Derivative time
Maximum output
increment
Minimum output
power
Maximum output
power
Output cycle time
Setpoint value
Setpoint low limit
Setpoint high limit







































































