



4
Regolazioni Avanzate
Le regolazioni di default del ricevitore sono adatte a molti utenti. Noi raccomandiamo di
volare inizialmente con queste regolazioni prima di fare qualsiasi modifica.
Parametri della sensibilità
1. Regolazione sensibilità del Ciclico P (default 100%)
Una sensibilità alta
darà maggior stabilità. Però se fosse troppo alta potrebbe dare degli
scuotimenti casuali se il modello avesse un livello di vibrazioni esagerato. Le oscillazioni ad alta
frequenza si possono verificare anche se la sensibilità fosse troppo alta.
Una sensibilità bassa
darà minor stabilità. Un valore troppo basso porta ad oscillazioni di bassa
frequenza o ad un modello poco stabile, particolarmente all’aperto con il vento.
Se si è ad una quota più elevata o in un clima più caldo, sensibilità maggiori sono più appro-
priate. In caso di quote più basse e climi più freddi, è vero il contrario.
2. I - Regolazione della sensibilità di tipo “Integrale” - B (Default 100%)
Una sensibilità alta
aumenterà la capacità del modello a stare in una data posizione, ma potrebbe
causare oscillazioni di bassa frequenza se fosse troppo alta.
Una sensibilità bassa
causerà una lenta deriva al modello.
Se ci si trova ad una quota più elevata o in un clima più caldo, sensibilità maggiori sono più
appropriate. In caso di quote più basse e climi più freddi, è vero il contrario.
3. D - Regolazione della sensibilità di tipo “Derivativo” - L (Default 100%)
Una sensibilità alta
aumenterà il rateo di risposta ai comandi. Se la sensibilità fosse troppo alta, si
avrebbero delle oscillazioni ad alta frequenza.
Una sensibilità bassa
ridurrà la risposta ai comandi.
4. P - Regolazione sensibilità imbardata “proporzionale” - A (Default 100%)
Una sensibilità alta
aumenterà la risposta al comando di imbardata. Impostando la sensibilità
troppo alta, si avrà una velocità di imbardata non necessaria e oscillazioni di alta frequenza
quando si cambia direzione.
Una sensibilità bassa
diminuirà la risposta al comando di imbardata. Impostando la sensibilità
troppo bassa, si avrà una risposta più lenta al comando di imbardata.
Se si è ad una quota più elevata o in un clima più caldo, sensibilità maggiori sono più appro-
priate. In caso di quote più basse e climi più freddi, è vero il contrario.
5. I - Regolazione della sensibilità di imbardata di tipo “Integrale” - B (Default 100%)
Una sensibilità alta
farà aumentare la capacità di mantenere la posizione sull’asse di imbardata.
Una sensibilità bassa
porterà una deriva sul controllo di imbardata.
Se si è ad una quota più elevata o in un clima più caldo, sensibilità maggiori sono più appro-
priate. In caso di quote più basse e climi più freddi, è vero il contrario.
6. D - Regolazione della sensibilità di imbardata di tipo “Derivativo” - L (Default 100%)
Una sensibilità alta
aumenterà il rateo di risposta ai comandi. Se la sensibilità fosse troppo alta, si
avrebbero delle oscillazioni ad alta frequenza.
Una sensibilità bassa
ridurrà la risposta ai comandi, ma non avrà effetto sulla stabilità.
IT
Volo di trimmaggio
Eseguire questa procedura se il modello deriva in modo consistente o se è stato riparato dopo un
incidente.
La procedura di volo di trimmaggio è stata eseguita in fabbrica durante il volo di prova e deve
essere eseguita di nuovo solamente se il modello non si livella consistentemente o se non rimane
fermo durante il volo stazionario. Il volo di trimmaggio serve per stabilire le impostazioni SAFE
durante il volo.
Il volo di trimmaggio deve essere eseguito in condizioni ambientali calme.
Entrare nella modalità volo di trimmaggio
1. Abbassare lo stick motore completamente.
2. Accendere la trasmittente.
3. Installare la batteria di bordo sul quadricottero.
4. Connettere il connettore della batteria all’ESC.
5. Passare in modalità di volo Normal. Accertarsi che tutti i trim siano centrati e che sia
visibile la schermata Flight Log.
6. Appoggiare il quadricottero su di una superficie piana nel punto in cui si vuole decollare.
7. Muovere e tenere lo stick sinistro nell’angolo in
basso a sinistra e lo stick destro nell’angolo in
alto a sinistra, come illustrato.
8. Mantenendo gli stick in questa posizione, tenere
premuto l’interruttore Bind/Panic finché la scher-
mata Flight Log non mostra:
F477 H:0
9. Rilasciare gli stick e il tasto bind anti-panico.
10. Il modello è pronto per il volo di trimmaggio.
Eseguire il volo di trimmaggio
1. Aumentare lentamente il motore per alzare il modello in
un hover stazionario. Effettuare le regolazioni necessarie
per tenere il modello fermo. La valutazione inizia quando si
inizia a muovere lo stick del motore verso l’alto. Eventuali
correzioni non influenzeranno il risultato ma possono richiedere un volo più lungo.
2. Mantenere il modello in un hover stazionario per 30 secondi. Movimenti molto lenti
vanno bene. La cosa più importante è mantenere livellato il quadcopter.
3. Una volta contenti del volo di trimmaggio, potete far atterrare il modello.
Uscire dalla modalità volo di trimmaggio
1. Dopo l’atterraggio, abbassare lo stick motore completamente.
2. Tenere premuto l’interruttore Bind/Panic per 5 secondi, i valori sono stati memorizzati e
si esce dalla modalità di trimmaggio.
Volo di prova
Dopo aver eseguito il volo di trimmaggio, provare a volare il modello per valutare le caratteri-
stiche di livellamento.
• Il modello dovrebbe tornare nel volo livellato consistentemente.
• Durante il decollo, il modello dovrebbe alzarsi con un minimo di correzioni.
• Durante un hover, lo stick di comando dovrebbe restare vicino alla posizione centrale.
Piccole regolazioni sono ammissibili.
Se il modello non vola bene o non si livella bene dopo il volo di trimmaggio, rifare l’intera
procedura del volo di trimmaggio da capo. Se il problema persiste, controllare se ci sono delle
componenti rotte nel modello, per esempio un albero piegato o altro che potrebbe causare
maggiori vibrazioni. È possibile che il volo di trimmaggio non salvi i valori corretti per via di vi-
brazioni eccessive, troppo vento o il mancato livellamento del modello. In questo caso, potrebbe
essere necessario eseguire dei voli di trimmagggio più corti. Provare prima il volo di trimmaggio
livellato di 30 secondi senza correzioni, come menzionato prima. Se le caratteristiche di
livellamento non sono soddisfacenti, accorciare gradualmente i voli di trimmagio, individuando
possibili miglioramenti, fino a quando il modello vola come descritto qui a sinistra.
Regolazione dei valori di sensibilità
Se si sta usando un trasmettitore Spektrum abilitato per la telemetria, le regolazioni della
sensibilità si possono vedere nella schermata Flight Log. Per individuare questa schermata si
faccia riferimento al manuale del proprio trasmettitore. I parametri di sensibilità attualmente se-
lezionati lampeggiano sullo schermo del trasmettitore. Se non si usa un trasmettitore Spektrum
abilitato per la telemetria, non si possono cambiare i parametri e i valori della sensibilità.
Una volta entrati nella modalità di regolazione della sensibilità, muovere lo stick dell’assetto
(Attitude) a destra e a sinistra per scegliere il parametro da regolare. Muovendo lo stick
verso destra si seleziona il parametro successivo, muovendolo verso sinistra si seleziona il
parametro precedente.
Per regolare il parametro selezionato muovere il suddetto stick in avanti o indietro. Muoven-
dolo in avanti si aumenta il valore di sensibilità, muovendolo indietro si diminuisce.
È sempre meglio regolare una sensibilità per volta. Fare delle regolazioni di piccola entità
(5% o meno) e provare il modello in volo per valutare le regolazioni fatte.
Se si vuole riportare l’attuale valore di sensibilità al valore di default del 100%, tenere lo stick
del timone completamente a destra per un secondo.
Memorizzare le regolazioni della sensibilità
1. Portare lo stick del motore completamente in basso.
2. Tenere premuto l’interruttore Bind/Panic per 5 secondi per salvare le regolazioni di
sensibilità fatte.
3. Rilasciare l’interruttore Bind/Panic.
4. The Flight Log screen will display blank gain settings and normal control of the model
will resume.
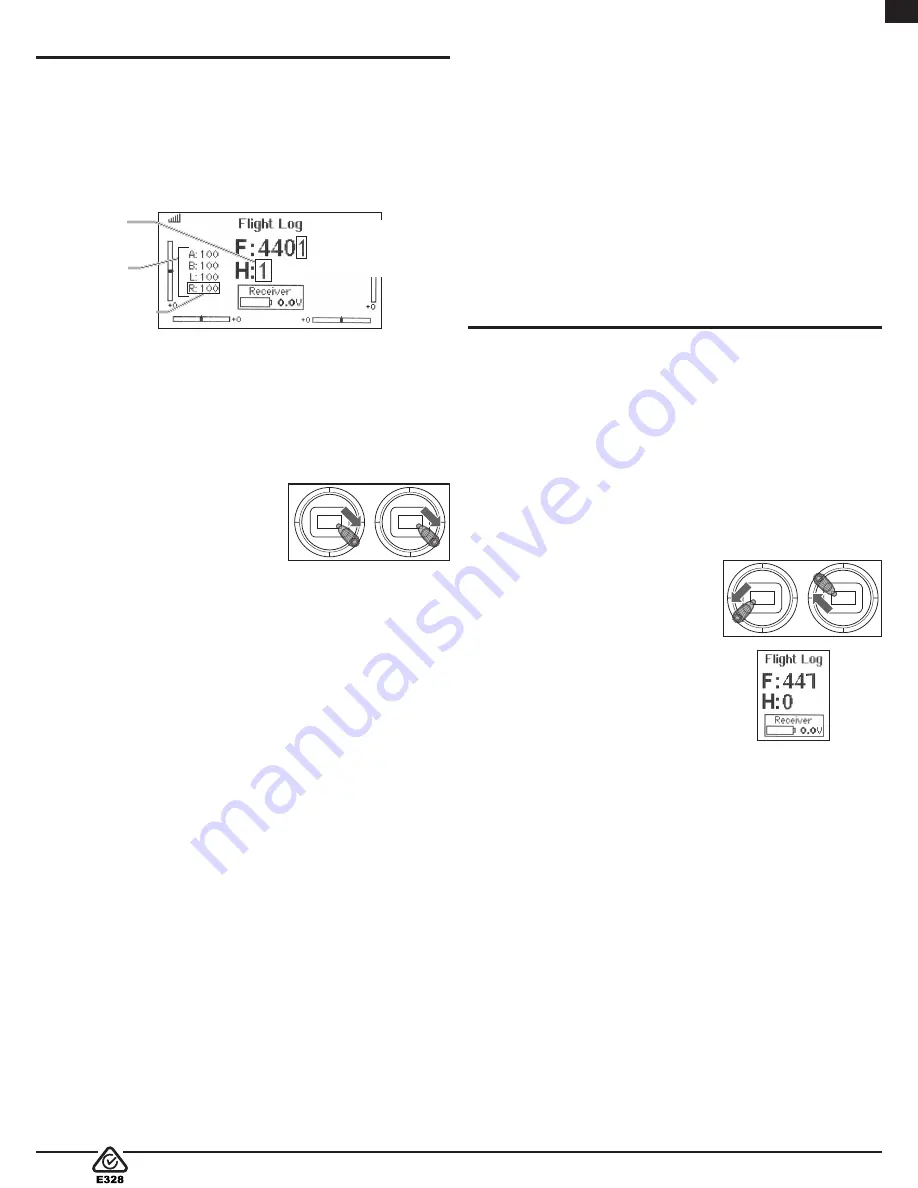
N umero pagina
1 = Sensibilità assetto
2 = Sensibilità imbardata
Parametro di
sensibilità
selezionato
Posizione dei
valori di
sensibilità
Schermata Flight Log
Il valore R: della sensi-
bilità non si dovrebbe
mai regolare
Per avere informazioni più aggiornate si faccia riferimento alla pagina
di questo prodotto su bladehelis.com
Entrare nella modalità di regolazione della sensibilità
1. Abbassare completamente lo stick del motore.
2. Accendere il trasmettitore.
3. Installare la batteria a bordo del quadricottero, fissandola con O-ring.
4. Collegare il connettore della batteria all’ESC.
5. Piazzare il quadricottero su di una superficie piana e lasciarlo fermo finché il LED aran-
cio della ricevente non resta acceso fisso, indicando che l’inizializzazione è completa.
6. Navigare fino alla schermata Flight Log.
7. Portare entrambi gli stick del trasmettitore
nell’angolo in basso a destra, come illustrato.
8. Tenere premuto l’interruttore Bind/Panic per 5
secondi. Si dovrebbero vedere i valori di sensibil-
ità (Gain) apparire sulla schermata Flight Log.
9. Rilasciare gli stick e l’interruttore Bind/Panic.
Adesso il modello si trova nella modalità di regolazione della sensibilità (Gain).
10. Procedere alla regolazione dei valori di sensibilità per fare i cambiamenti desiderati.
Created 9/15 | 51216
©2015 Horizon Hobby, LLC. Blade, Mach 25, DSM, DSM2, DSMX, SAFE, the SAFE logo, ModelMatch and the Horizon Hobby logo are trademarks or registered trademarks of Horizon Hobby, LLC. The Spektrum trademark is used with permission of Bachmann Industries, Inc.
All other trademarks, service marks and logos are property of their respective owners. Patents pending.







































































