














Shenzhen Hpmont Technology Co., Ltd.
Chapter 6 Function Introduction
HD3N Series User Manual V1.1
- 57 -
6.2.4
F03: Acc. / Dec. Parameter
Ref. code
Function Description
Setting Range [Default]
F03.00
Acc. / Dec. modes selection
00 - 11 [00]
Unit: Acc. / Dec. modes selection
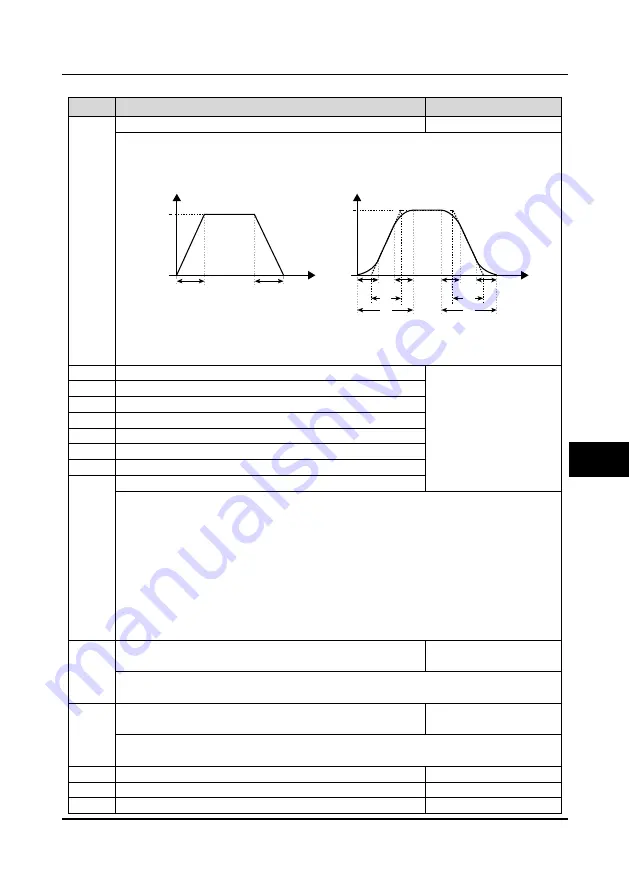
0: Linear Acc. / Dec.. Output frequency increase or decrease according to constant slope.
1: S curve Acc. / Dec.. Output frequency increase or decrease accoring to S curve.
•
T5: setting acc time; T7: actual acc time. T6: setting dec time; T8: actual dec time.
Ten: Reference frequency for Acc. / Dec. time
0: Max frequency (F00.06).
1: Setting frequency.
F03.01
Acc time 1
0.0 - 6000.0
[7.5 - 15kW inverter: 10.0s]
[18.5 - 45kW inverter: 30.0s]
F03.02
Dec time 1
F03.03
Acc time 2
F03.04
Dec time 2
F03.05
Acc time 3
F03.06
Dec time 3
F03.07
Acc time 4
F03.08
Dec time 4
Acc time is the time that HD3N accelerates from 0 Hz to reference frequency in linear form.
Dec time is the time that HD3N decelerates from reference frequency to 0Hz in linear form.
•
Reference frequency is set by tens of F03.00. It supports acc time or dec time only, refer to figure in
F03.00.
Switching of Acc. / Dec. time:
•
Select Acc. / Dec. time by No. 26/27 of DI terminal or F03.09/F03.10 when HD3N is running.
Switching of Acc. / Dec. mode:
•
The Acc. / Dec. modes (linear or S curve) can be set by F03.00 or No 28 function of DI terminal.
Note: If braking units are not adopted correctly, dec speed is too high or load interia is too large, over-pressure
will occur to HD3N. Please select suitable braking unit, increase the dec time or adjust F19.18/F19.19.
F03.09
Switching frequency of acc time 1 and 2
0.00 - Upper limit
frequency [0.00Hz]
When running frequency is lower than F03.09, acc time 2 is adopted; otherwise acc time 1 is adopted.
•
This function is invalid when Acc. / Dec. time is selected by DI terminal (DI = 26/27).
F03.10
Switching frequency of dec time 2 and 1
0.00 - Upper limit
frequency [0.00Hz]
When running frequency is lower than 03.10, dec time 2 is adopted; otherwise dec time 1 is adopted.
•
This function is invalid when Acc. / Dec. time is selected by DI terminal (DI = 26/27).
F03.11
Characteristic time of S curve at beginning of acc
0.00 - 2.50 [0.20s]
F03.12
Characteristic time of S curve at end of acc
0.00 - 2.50 [0.20s]
F03.13
Characteristic time of S curve at beginning of dec
0.00 - 2.50 [0.20s]
F00.06
Frequency
Time
0
T1
:
F03.11
T2
:
F03.12
T3
:
F03.13
T4
:
F03.14
T1
T2
T3
T4
T5
T6
T7
T8
F00.06
Frequency
Time
0
Acc. time
Dec. time
6