


























Chapter 5 Operation Instructions
Shenzhen Hpmont Technology Co., Ltd.
-20-
HD3Z Series User Manual V1.2
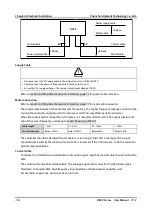
Main frequency setting channel (F00.10) Aux frequency setting channel (F19.00)
Note
/
6: PID output
6-7: AI1 - AI2
7-8: AI1 - AI2
5.1.3
Operation Status
Operation status Description
Stop status
After HD3Z is initialized, if no command inputs or stop command is given, there will be output
from U/V/W of HD3Z and keypad displays
.
Run status
When HD3Z receives running command, U/V/W terminal outputs, keypad displays
.
Motor parameter
auto-tuning
F08.06 = 1 or 2, after receiving running command, HD3Z enters motor parameter auto-tuning.
It stops when auto-tuning finished.
5.1.4
Running Modes
Running modes
Description
Jog start
In keypad control mode, press
to jog start frequency running (set F00.15, F03.15 and
F03.16).
In terminal control mode, when receiving DI jog start command (No.20 - 25 function), HD3Z
runs according to relative frequency (set F00.15, F03.15, F03.16 and F05.21).
PID adjustment
running
PID adjustment function is valid (F04.00 = 1), HD3Z runs in PID mode. Process PID adjusts
according to setting and feedback (need setting F04).
•
Disable process PID by DI terminal (No.33 function) and switch to other running modes.
Multi-speed
running
With logic combination of DI terminal (No.13 - 16 function), select multi-speed frequency 1-15
(F06.00 - F06.14) running.
5.2
Operation Instruction
5.2.1
Keypad Description
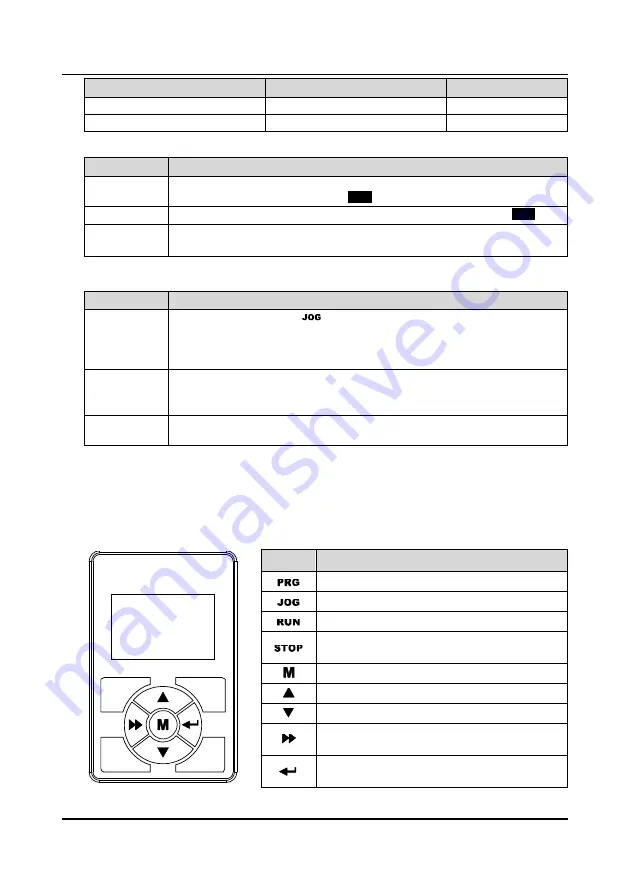
HD3Z is equipped with LCD. Refer to Table 5-1 for buttons and functions.
Table 5-1 Button description
Button
Description
Enter or exit
Jog start HD3Z in keypad control mode
Start HD3Z in keypad control mode
a. Stop HD3Z in keypad mode
b. Reset fault when fault occurs
F00.12 sets definite function
Increase parameter or value
Decrease parameter or value
a. Select setting parameter and shift bit
b. Stop in loop / display the parameter during running
a. Enter lower menu
b. Confirm saving the data
STOP
RUN
ENT
SHF
JOG
PRG
STOP
RUN