27
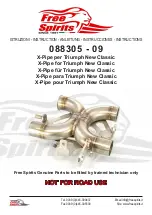
S-shaped motion
A curve, which is gradual at the beginning of acceleration but rises sharply
halfway, is drawn.
Use it in the applications for which you want to set the
acceleration/deceleration high due to tact time requirement but desire a
gradual curve at the beginning of movement or immediately before stop.
* Set the degree of the S-shaped motion with the parameter No. 56 [S-shaped
motion ratio setting]. The setting unit is % and the setting range is between 0 and
100.
(The above is the image graph when 100% setting is made.)
If “0” is set, the S-shaped motion becomes invalid.
However, it will not be reflected in jogging/increment movement by PC or
Teaching Pendant operation.
(Note) It cannot be set for the PCON controller. The parameter No. 56 is reserved.
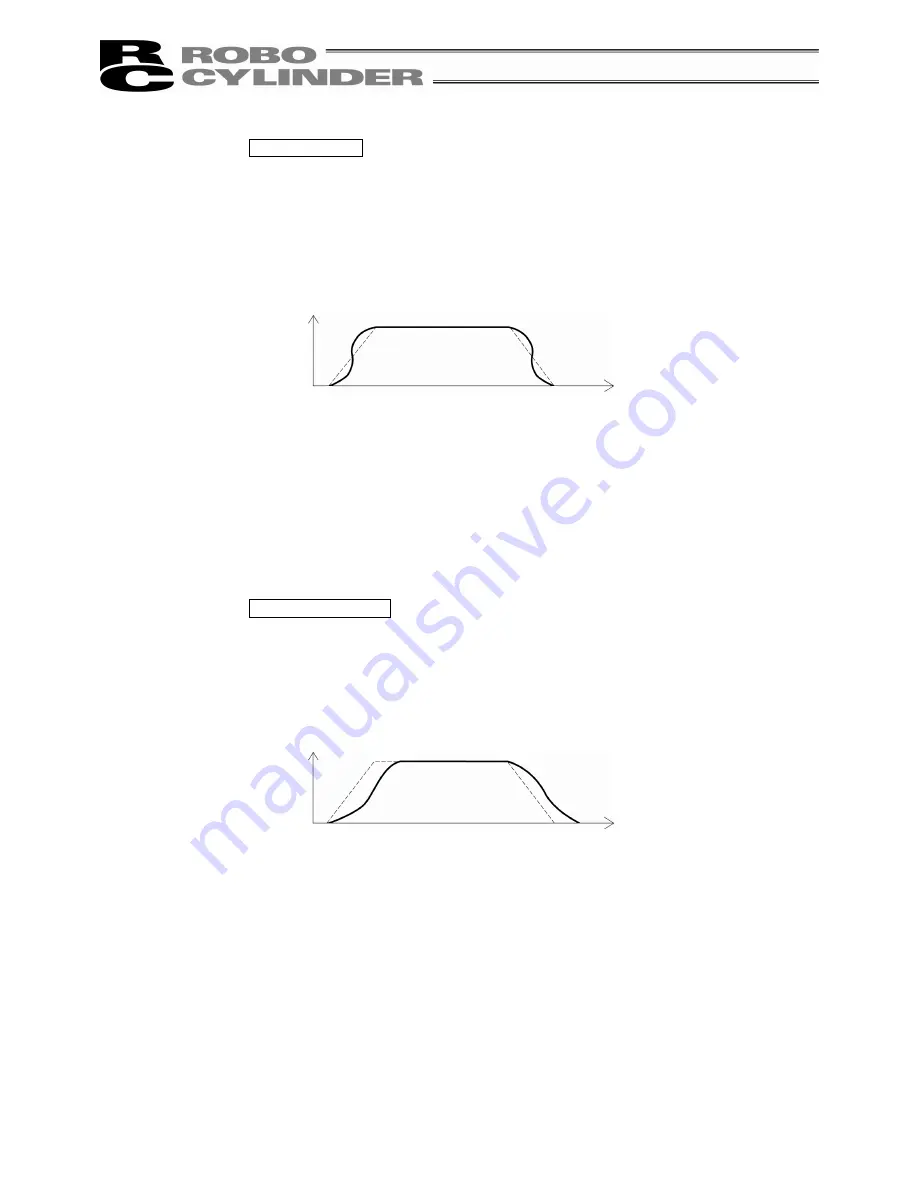
First-order delay filter
More gradual acceleration/deceleration curves are drawn than the linear
acceleration/deceleration (trapezoid pattern).
Use this in the applications by giving micro vibrations to work during
acceleration/deceleration not desired.
* Set the degree of the first-order lag with the parameter No. 55 (constant for the
position command first-order filtering). The setting unit is 0.1 msec and the
setting range is between 0.0 and 100.0.
If “0” is set, the first-lag filter will become invalid.
However, it will not be reflected in jogging/increment movement by PC or
Teaching Pendant operation.
(Note) It cannot be set for the PCON controller. The parameter No. 55 is reserved.
(10) Cmnd Mode:
- This field is invalid.
The factory setting is 0.
Speed
Time
Speed
Time
Summary of Contents for CON-T
Page 1: ...Teaching Pendant Operating Manual First edition IAI America Inc ...
Page 2: ......
Page 4: ......
Page 6: ......
Page 14: ...6 6 2 External View External Dimensions ...
Page 78: ...70 Examples of PCON CY Controller On following page ...
Page 79: ...71 From previous page On following page ...
Page 80: ...72 From previous page On following page ...
Page 81: ...73 From previous page ...
Page 95: ......