





























11. Monitor
216
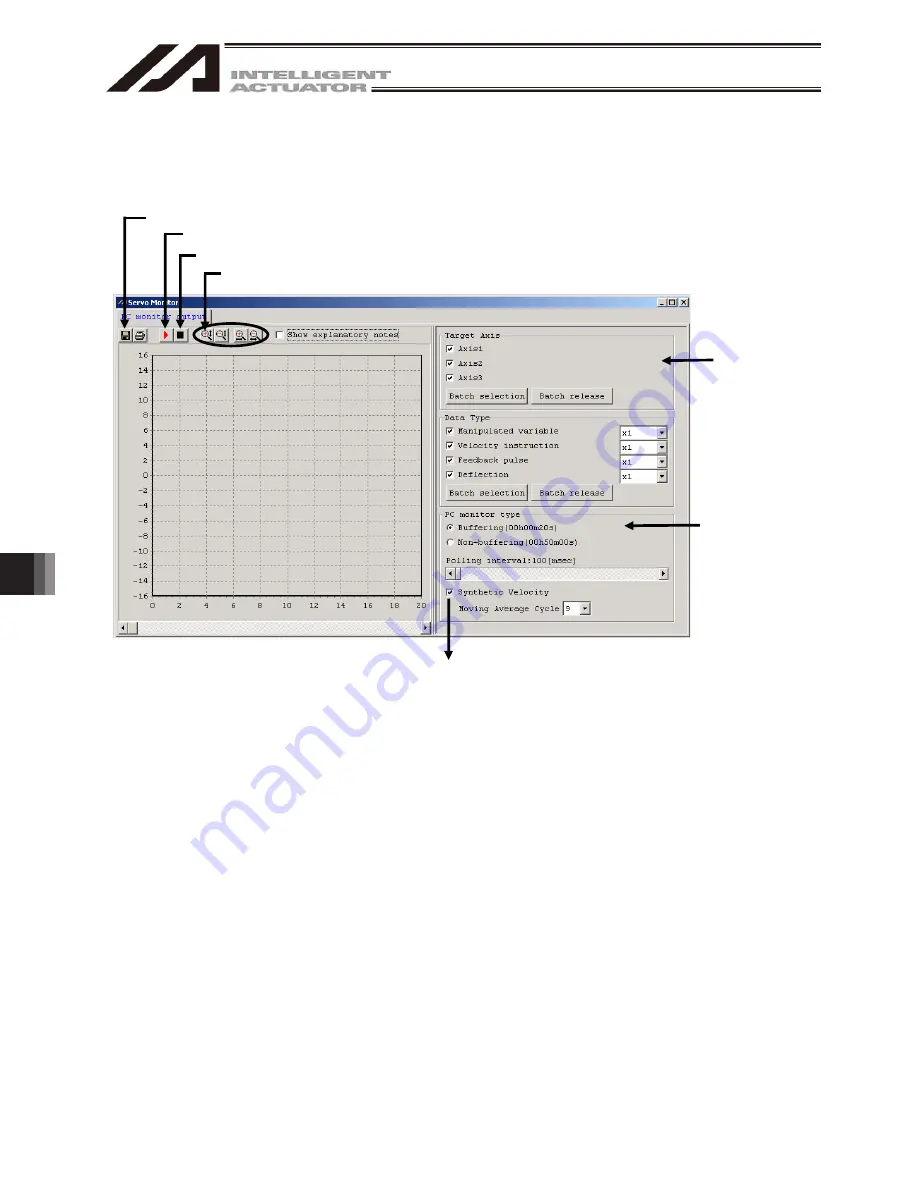
In other than TTA and SCARA-axis of MSEL, the operation amount, speed command, feedback pulse and
position deviation of the axes selected in Applicable Axis can be shown. Select the item desired to be shown
in Data Type.
(Note) SCARA Axis cannot be monitored for MSEL.
Save the data in a file. (CSV format)
Start data acquisition.
Stop data acquisition.
Change the scale of the graph.
Time (msec)
Manipulated Variable: Original command pulse that composes the trapezoid or triangular patterns
calculated from speed, acceleration and deceleration.
Speed Command: Real command pulses sent from the controllers to the actuators.
Feedback Pulses: Positional pulses (feedback pulses) transmitted from the actuator encoder.
Position Deviation: Difference between actual command pulse and feedback pulse (actual position)
Fig. 11.33 Monitoring Data (Other than TTA and SCARA-axis of MSEL)
Sampling Cycle when Buffered
The period of sampling cycle for one sample should be 1msec.
Number of puls
es
Select the
target axis to
monitor.
Display the synthetic velocity of orthogonal axes.
The synthetic velocity can be checked when
orthogonal axes are controlled simultaneously and
circle movement is performed using CIR2 instruction.
20 seconds at
maximum
when buffering
Summary of Contents for IA-101-X-MW
Page 2: ......
Page 4: ......
Page 8: ......
Page 50: ...1 Before You Begin 42 1 4 Connection to Controller Fig 1 48 X SEL K J Type Controller...
Page 52: ...1 Before You Begin 44 Figure shows example of TT Fig 1 50 Table Top Actuator TT TTA...
Page 53: ...1 Before You Begin 45 Fig 1 51 X SEL KX JX Type Controller...
Page 62: ...1 Before You Begin 54 Fig 1 60 ASEL Type Controller USB Cable...
Page 63: ...1 Before You Begin 55 Fig 1 61 PSEL Type Controller USB Cable...
Page 189: ...9 Symbol Edit Window 181...
Page 251: ...13 How to Reset an Absolute Encoder 243 Fig 13 38 Arm Length 120 Reference Position...
Page 386: ...16 Appendix 378...
Page 391: ......







































































