





























13. How to Reset an
Absolute Encoder
257
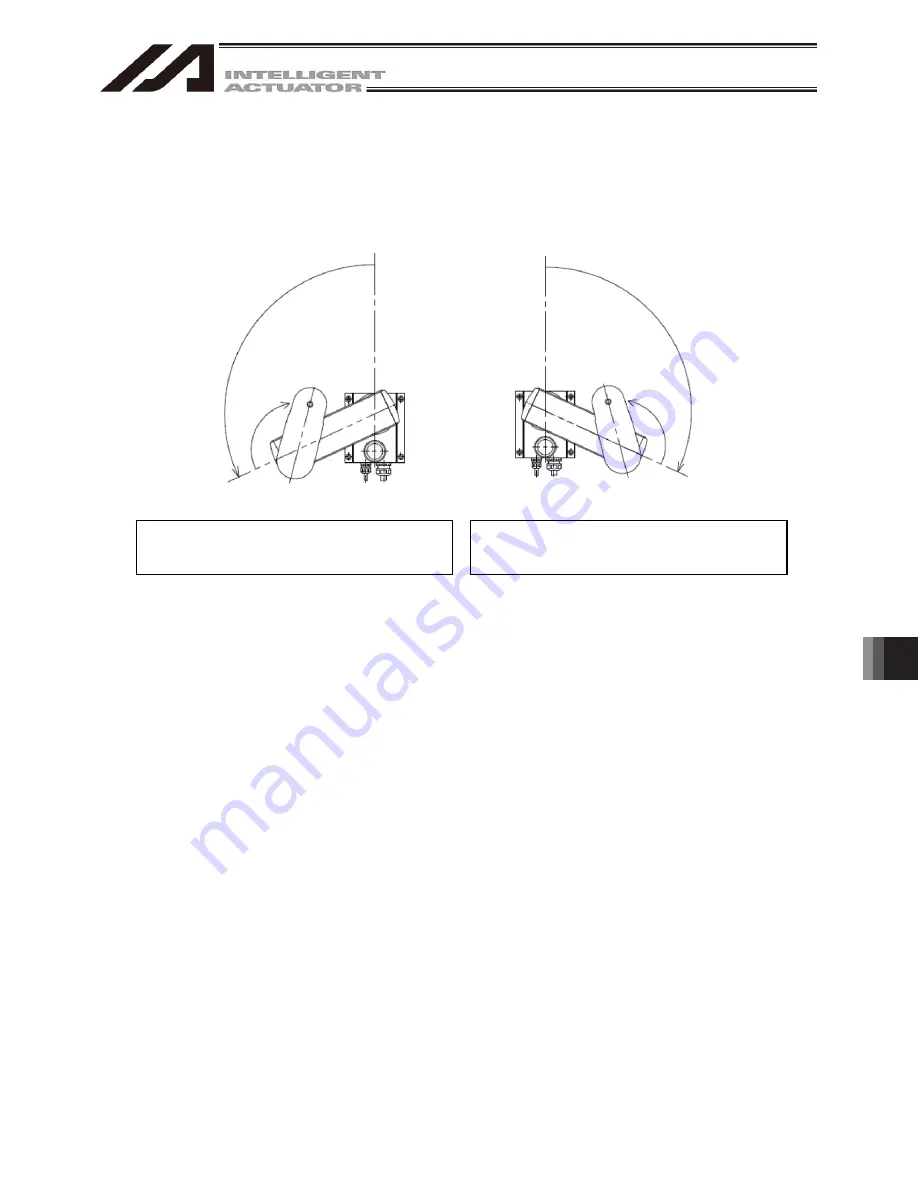
[Initial posture]
Arm1, Arm 2
Considering the stopper pressing position, adjust the posture to either of right arm system or left arm
system. When the product is delivered, it is set to the right arm system. Adjust to the right arm system.
In case the arm interferes with the peripheral in the right arm system, set it to the left arm system in
advance, conduct “stopper pressing position acquirement” and then adjust to the left arm system.
[Refer to 13.3.2 How to Acquire the Stopper Interfering Point]
Arm 2 =
Negative direction of coordinate
Arm 1 =
Positive direction of coordinate
Arm 1 =
Negative direction of coordinate
Arm 2 =
Positive direction of coordinate
Fig. 13.64 Initial Posture
For the position, put it apart from the stopper position for 10deg or more.
Setting it too close to the stopper, Error No. B0D “Push Stopper Operation Start Position Error” may
occur at operation.
Initial posture of left arm system
Arm 1 = Positive direction of coordinate
Arm 2 = Negative direction of coordinate
Initial posture of right arm system (At the delivery)
Arm 1 = Negative direction of coordinate
Arm 2 = Positive direction of coordinate
Summary of Contents for IA-101-X-MW
Page 2: ......
Page 4: ......
Page 8: ......
Page 50: ...1 Before You Begin 42 1 4 Connection to Controller Fig 1 48 X SEL K J Type Controller...
Page 52: ...1 Before You Begin 44 Figure shows example of TT Fig 1 50 Table Top Actuator TT TTA...
Page 53: ...1 Before You Begin 45 Fig 1 51 X SEL KX JX Type Controller...
Page 62: ...1 Before You Begin 54 Fig 1 60 ASEL Type Controller USB Cable...
Page 63: ...1 Before You Begin 55 Fig 1 61 PSEL Type Controller USB Cable...
Page 189: ...9 Symbol Edit Window 181...
Page 251: ...13 How to Reset an Absolute Encoder 243 Fig 13 38 Arm Length 120 Reference Position...
Page 386: ...16 Appendix 378...
Page 391: ......







































































