


























26
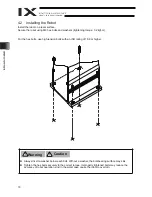
5. Precautions for Use
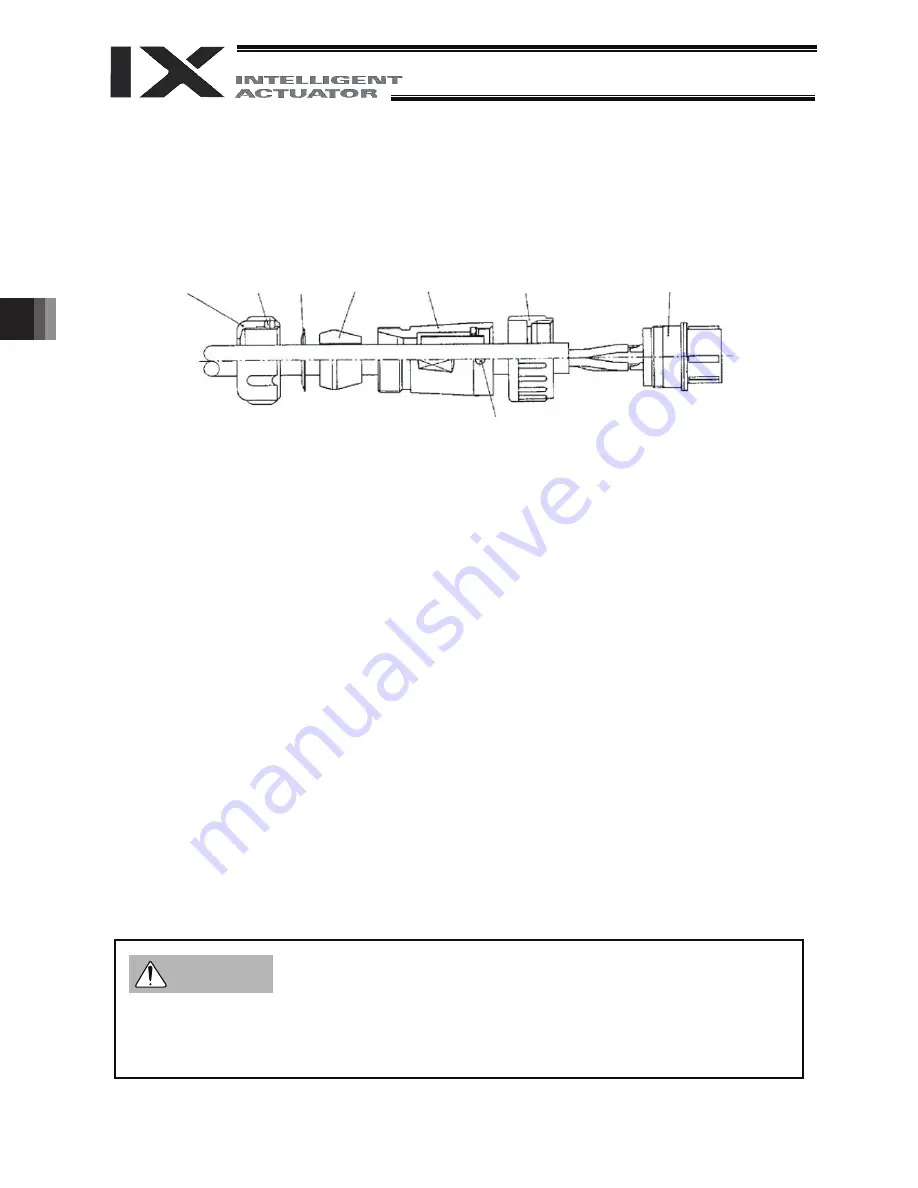
The robot comes with a 16-pin plug to be connected to the user connector.
Pins 1 to 15 of the connector can be used. Pin 16 is connected to a shielded cable and cannot be used for
signal lines.
Use a cable with an outer diameter of
I
13.1 to 15.0. The method to wire the supplied connector is shown
below.
[1]: Screw the barrel into the end bell and affix with setscrew A.
[2]: Push the cable gasket and washer into the end bell, hold the end bell in position, and then screw in
the clamp nut.
[3]: Move the cable back and forth and to right and left until it moves smoothly, and then tighten setscrew
B to the specified torque.
Tightening torque of each part
y
End bell:
10 kgf
cm to 15 kgf
cm
y
Clamp nut:
15 kgf
cm to 20 kgf
cm
y
Setscrew A, B: 2 kgf
cm to 3 kgf
cm
If the waterproof user connector and user piping joint are not used, attach the supplied cap and blank plug
on the connector and joint, respectively. Failure to do so will cause water or dust to enter.
z
Tighten each connector screw to the specified torque.
z
If the outer diameter of the cable is smaller than the specified size, wrap a tape, etc., around the
cable clamp to increase the clamp size. Failure to do so will cause water or dust to enter.
Caution
Clamp nut Setscrew B Washer
End bell
Coupling nut
Barrel
Cable
gasket
Setscrew A
Summary of Contents for Intelligent Actuator IX Series
Page 2: ......
Page 55: ...49 6 Inspection Maintenance 6 Click the Servo OFF button 7 Press the emergency stop switch ...
Page 75: ......




























































