
















68
Change History
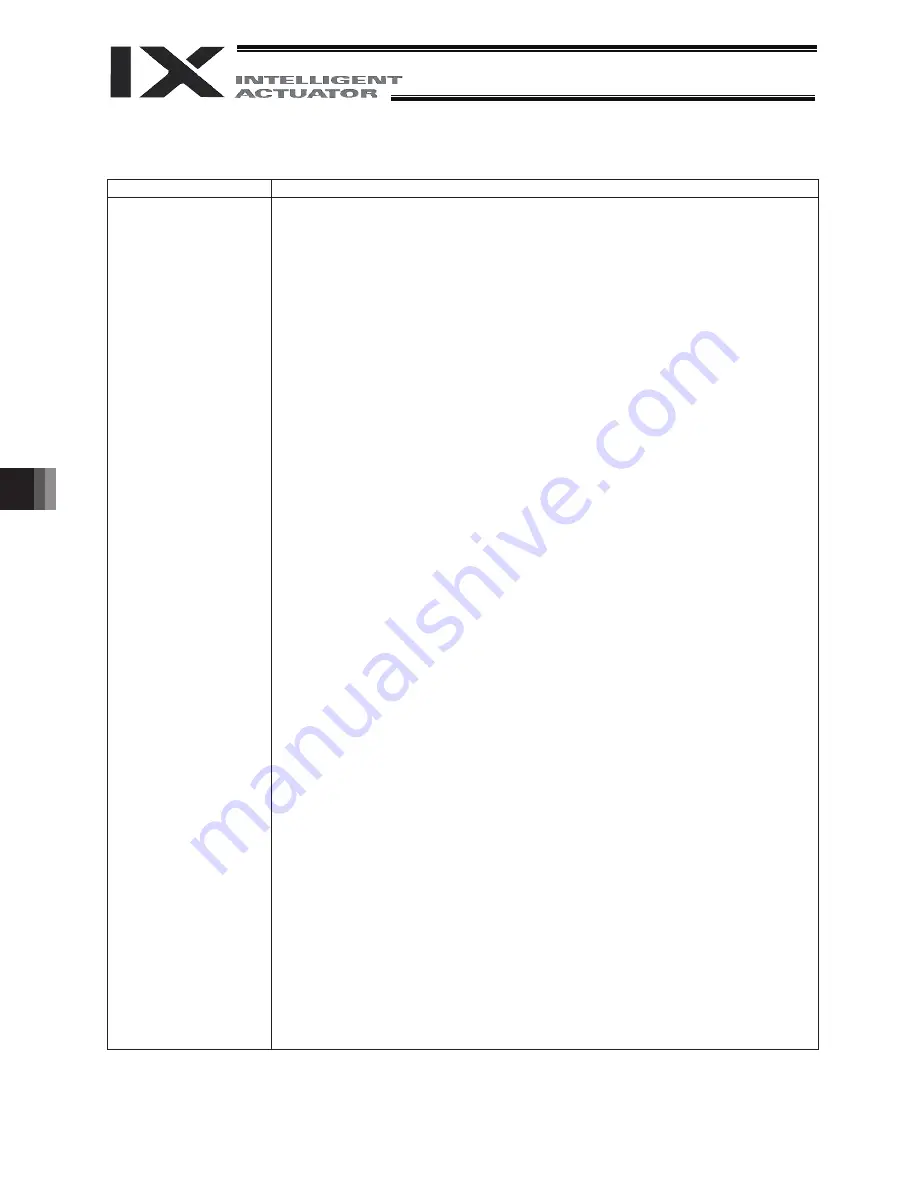
Change History
Revision Date
Description of Revision
A page for CE Marking added
Introduction, Safety Symbols and Safety Precautions are deleted
Pg. 1 to 7
Pg. 8
Pg. 18
Pg. 29
Pg. 57, 59
Pg. 65, 66
8. Contacting Us deleted
4.1 Installation Posture added
Safety Guide added
Caution in Handling added
Brake voltage source capacity from 20W to 30W
ĺ
changed to 20W
Caution notes added telling to go to see the doctor to have
an appropriate treatment when the grease got into an eye
Brake voltage source capacity 20W added to specifications
Contents changed in 8. Warranty
April 2011
March 2012
August 2012
Second edition
Third edition
Fourth edition
Summary of Contents for Intelligent Actuator IX Series
Page 2: ......
Page 55: ...49 6 Inspection Maintenance 6 Click the Servo OFF button 7 Press the emergency stop switch ...
Page 75: ......







































































