

























19
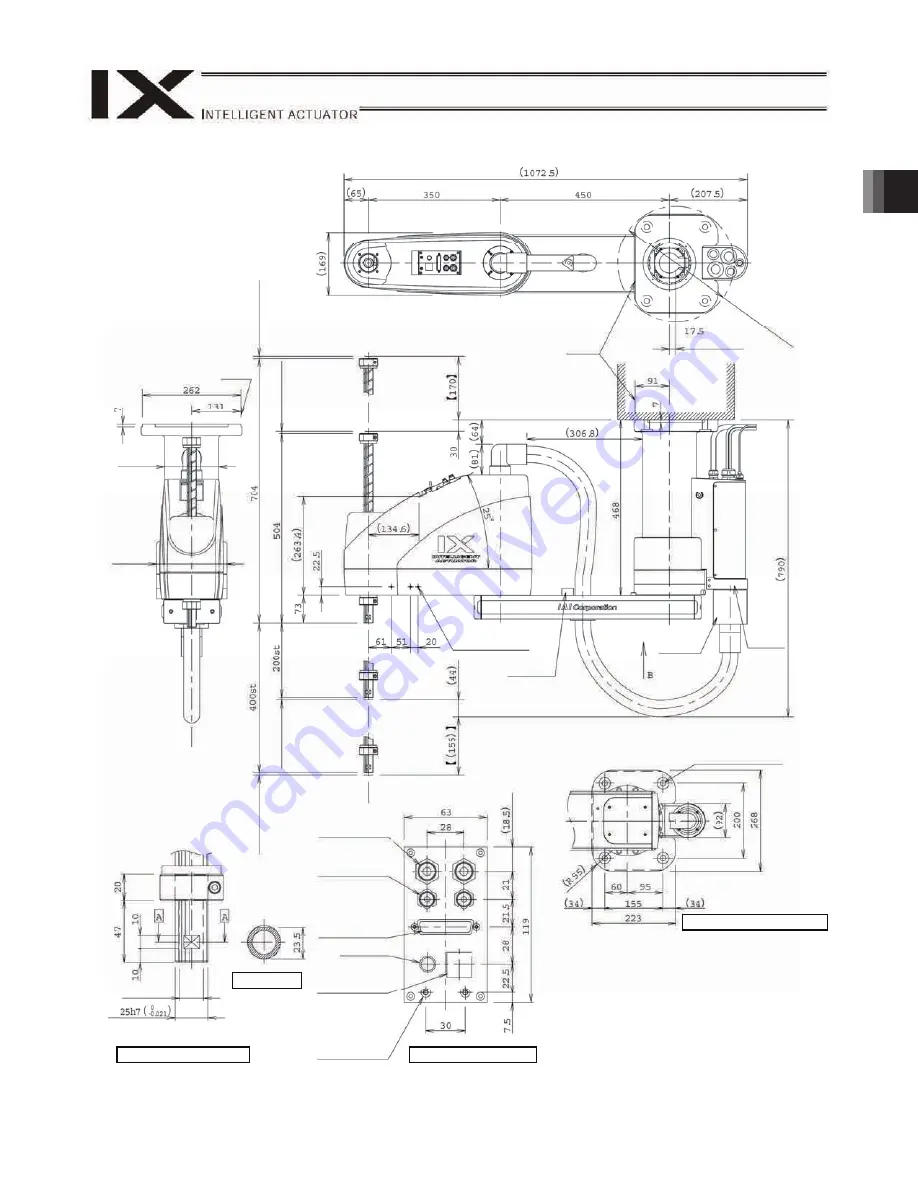
2. External Dimensions
black
red yellow
white
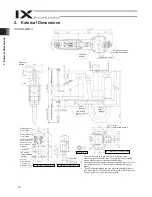
IX-HNN-80
H
Reference
surface
(Mounting center)
310 (recommended
mounting dimension)
Reference
surface
6 (Mechani
cal e
nd)
6 (Mechani
cal e
nd)
Arm 2
stopper
3-M4, depth 8
Same on opposite
side (*1)
Arm 1
stopper
Quick joint for
6 air tube
Quick joint for
4 air tube
User connector (D-
sub connector for
user wiring, 25-pin,
socket, fastener
size M2.6)
ALM (*3)
Spacer
Outer diameter
7, height 10,
M4, depth 5
(*2)
Detail view of panel (1/2)
Detail view of arm tip (1/2)
18 hollow
Section A-A
B: Detail view of base mount
4-
14, board
24 counterbored, depth 5
*1: The prepared holes denoted by “3-M4, depth 8” are through
holes connecting the side faces of the arm.
*2: The external force acting upon the spacer shall be kept to
30 N or less in axial direction or 2 N-m or less in rotating
direction (per spacer).
*3: The LED will actuate when the user wires the applicable
lines in such a way that 24 VDC is applied to the user-wired
LED terminal upon output of a signal from the controller.
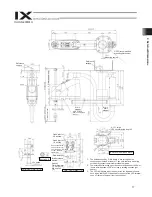
Arm 2
stopper
* The inverse specification is installed upside down.
BK switch
(brake release
switch)
(
144)
(
188)
6 (Mechani
cal e
nd)
6 (Mechani
cal e
nd)
Summary of Contents for IX Series
Page 2: ......
Page 4: ......
Page 56: ...50 9 How to Install ...
Page 58: ...52 9 How to Install Center of recommended installation part ...
Page 104: ......
Page 105: ......







































































