



























33
7. Specifications
Item
Specifications
Surrounding air temperature/humidity
Temperature: 0 to 40
°
C, humidity: 20 to 85%RH or
less (non-condensing)
Operating
environment
s
s
e
l
r
o
0
0
0
,
1
m
e
d
u
t
i
t
l
A
B
d
e
s
i
o
N
73
Robot weight
kg
30.5
Power supply
230 V 50/60 Hz 8 A
Allowable supply voltage
fluctuation
%
±
10
Overvoltage category (IEC60664-1)
Category III
Controller
3
e
e
r
g
e
d
n
o
i
t
u
ll
o
P
)
1
-
4
6
6
0
6
C
E
I
(
e
e
r
g
e
d
n
o
i
t
u
ll
o
P
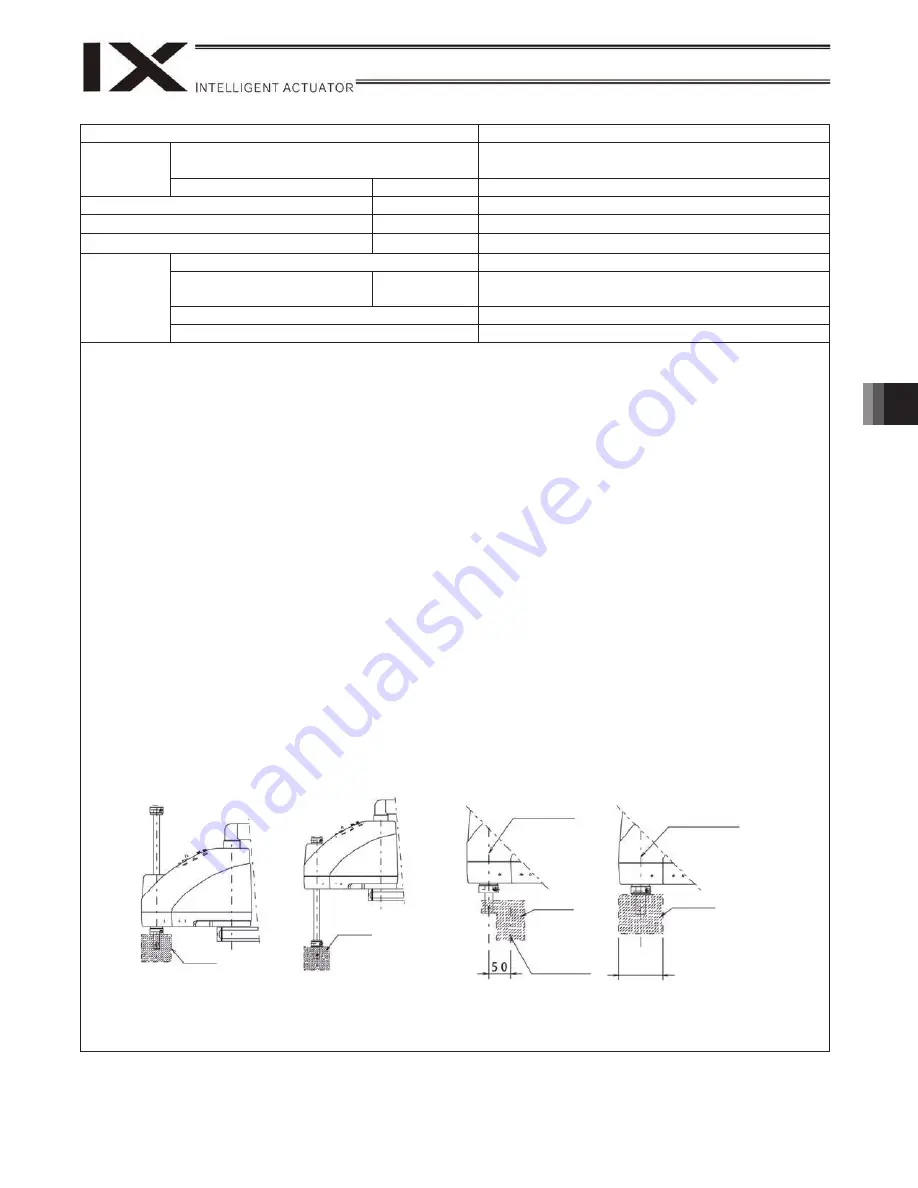
*1: To move the robot horizontally at high speed, perform teaching so that the vertical axis stays as close to
the top position as possible. (Fig. 1)
To operate the robot with its vertical axis at the bottom position, the speed and acceleration must be
reduced as appropriate. (Fig. 2)
*2: Assuming PTP instruction operation. The maximum composite speed is not the maximum speed of CP
operation.
*3: Positioning precision when the robot is operated repeatedly to one specified position from the same
starting position at the same speed and acceleration/deceleration using the same arm (at a constant
surrounding air temperature of 20
°
C). Take note that this is not the absolute positioning precision.
Also note that the positioning repeatability may deviate from the specified value if the arm is changed,
positioning is performed to one specified position from multiple positions, or any of the operating conditions
such as operating speed and acceleration/deceleration setting is changed.
*4: Measured when the robot is operated at the maximum speed, carrying a load of 2 kg.
*5: Equivalent allowable inertial moment at the center of rotation of axis 4. The offset from the center of
rotation of axis 4 to the center of gravity of the tool shall be 50 mm or less. (Fig. 3)
If the center of gravity of the tool deviates from the center of rotation of axis 4, the acceleration setting
needs to be decreased as necessary.
*6: If the allowable tool diameter is exceeded, the tool will interfere with the robot within the robot’s operation
area. (Fig. 4)
*7: The alarm LED will actuate when the user provides a circuit that applies 24 VDC to the user-wired LED
terminal upon I/O output of a signal from the controller.
*8: Push force when driver card parameter No. 38, “Push torque limit during positioning” is set to 70%.
*9: Push force when driver card parameter No. 38, “Push torque limit during positioning” is set to 20%.
Although this parameter can be set to a desired value from 15% to 70%, push force will not stabilize if the
set value is outside the range of 40 to 70%.
Design references: Machine Directive Annex I, EN292-1, EN292-2, EN1050, EN60204-1, EN775
Top
position
Tool
Bottom
position
Tool
Center of
rotational axis
Tool
Tool’s center
of gravity
Tool
Center of
rotational axis
(Fig. 1)
(Fig. 2)
(Fig. 3)
(Fig. 4)
φ
100
Brake power source for main unit
W
DC24VI10% 20W
Summary of Contents for IX Series
Page 2: ......
Page 4: ......
Page 56: ...50 9 How to Install ...
Page 58: ...52 9 How to Install Center of recommended installation part ...
Page 104: ......
Page 105: ......







































































