





























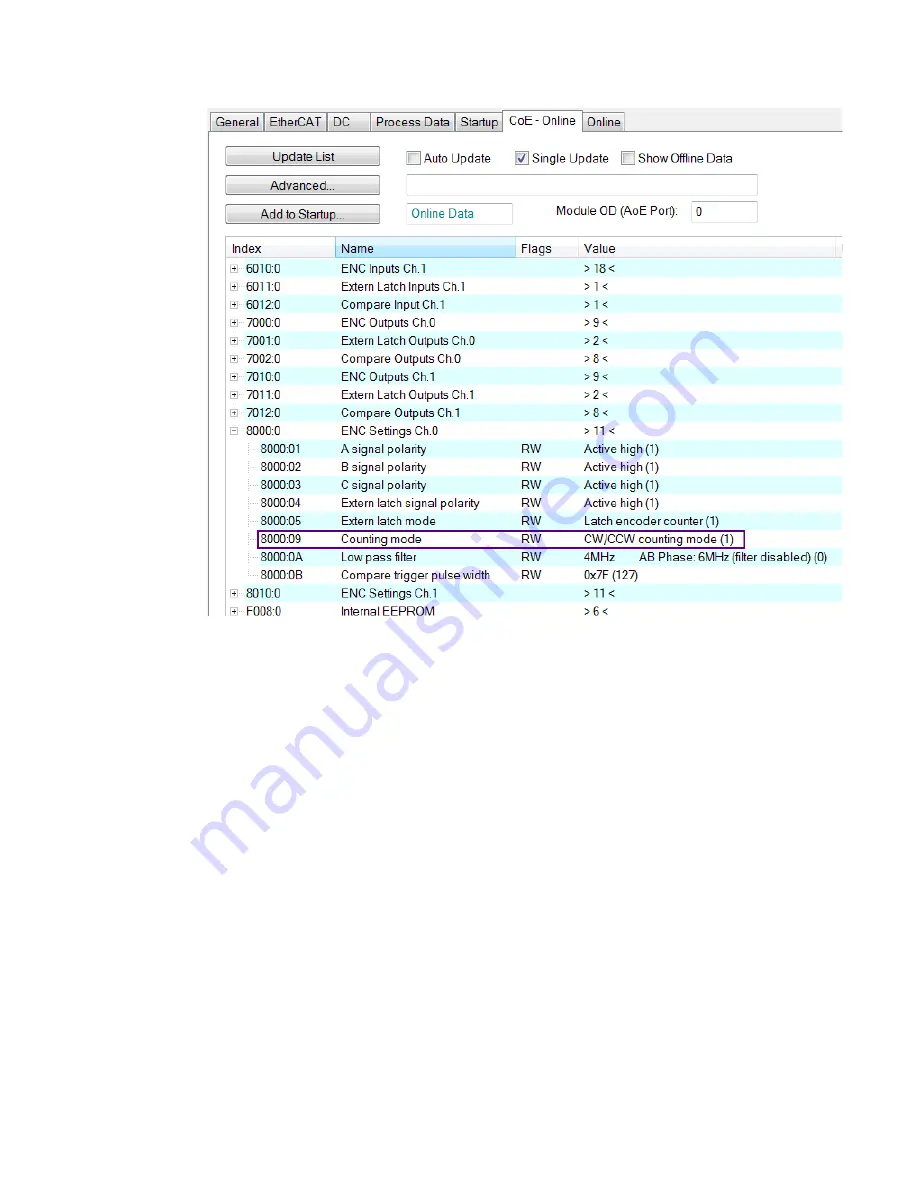
All the relevant encoder configurations have to be set first before the process data is
being used by the application program. Once the parameters are set, the encoder
counter is basically ready for operation.
If required, the configuration can be permanently save to an internal non-volatile
memory of the ECAT-2092T. After powering on the device it will immediately be
initialized according configuration setting. The procedure for saving the configuration
data is being described in chapter 7.4.
6.2.3 EtherCAT Slave Process Data Assignment
The user has to select the process data which has to be transferred between the
EtherCAT master and slave during each cycle (Process Data Objects, PDOs). The process
data exist of two parts:
TxPDO: Data which is being read by the master (e.g. encoder status) .
RxPDO: Data or parameters which is being sent to the slave (e.g. reset encoder
position).
Once the parameters of the process data image has been defined by the user the master
ICP DAS
Page
ECAT-2092T User Manual
Version 1.0
32
Summary of Contents for ECAT-2092T
Page 3: ...Revision Revision Date Description Author 1 18 02 2019 Initial version M K...
Page 50: ...Table 23 Resetting latch register procedure ICP DAS Page ECAT 2092T User Manual Version 1 0 50...
Page 55: ...Step 5 Set the ECAT 2092T back into OP mode ICP DAS Page ECAT 2092T User Manual Version 1 0 55...
Page 70: ......






































































