






laps de temps le gyroscope
ne doit pas bouger
. Au bout de 3 5 sec. La
LED reste allumée et le servo arrière qui y est branché bouge brièvement.
Le gyroscope est maintenant opérationnel.
En mode normal, le gyroscope réagit maintenant aux mouvements de
rotation de l'hélicoptère autour de l'axe de rotation du gyroscope par un
ordre de commande inverse sur le servo, le servo suit les ordres de
commande du manche de commande du servo arrière.
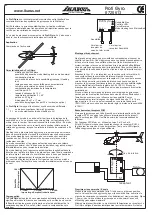
Après avoir branché l'alimentation du récepteur, attendez env. 10 sec.
Avant de rallumer le gyroscope. Ne soumettez pas le gyroscope à des
écarts de température trop importants. Vous pouvez provoquer un nouvel
alignement en coupant et en rebranchant l'alimentation.
Une fois allumé, le gyroscope vérifie si la voie attribuée à la sensibilité
reçoit un signal. Si ce n'est pas le cas, il continue à fonctionner selon la
sensibilité qui est réglée sur le potentiomètre. Le mode selon lequel doit
fonctionner le gyroscope (mode normal ou mode Heading Lock), est
déterminé par la position du Jumper «Heading Lock Marche / Arrêt».
Lorsque le Jumper n'est pas en place lorsque vous allumez, le gyroscope
fonctionnera en mode Heading Lock jusqu'au prochain allumage, s'il est
en place, il fonctionnera en mode normal.
Utilisation Reverse
Avec le Jumper Reverse, vous pouvez inverser le sens de fonctionnement
du gyroscope, la question se pose lorsque vous allumez, et sera
appliquée jusqu'à ce que vous coupiez. Vous pouvez également inverser
le sens de rotation du servo en faisant basculer l'axe de rotation du
gyroscopoe de 180°.
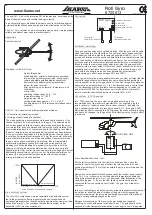
Réglage mécanique de base
Après le montage, il faut d'abord positionner le servo arrière
Mettez le gyroscope en mode normal. Les manches et les trims doivent
être au neutre. En position neutre du manche, le palonnier du servo doit
être perpendiculaire à la poutre arrière pour avoir obtenir le même
débattement de chaque coté. Le bras de la tringle de commande arrière
doit également être perpendiculaire à la poutre.
Déplacez le servo dans le sens longitudinal (sur l'ECO), et ajustez la
tringle de telle sorte que les pales aient un angle d'attaque, donné par le
fabricant, d'env. 3..7°. Veillez à un bon fonctionnement des tringles de
commande avec le moins de jeu possible. En aucun cas, le coulisseau ne
doit être en butée lorsque le manche de commande se trouve en
débattement maxi, et ce, des deux cotés
.
Attention, avant le vol vérifiez dans quel sens fonctionne le
gyroscope, sinon votre modèle s'abîmera dès le décollage en faisant
d'incontrôlables pirouettes.
Si vous tournez votre modèle autour de l'axe du rotor principal vers la gauche, le
gyroscope doit provoquer avec le rotor arrière, un débattement vers la droite du
modèle autour de l'axe du rotor, et inversement. Si vous utilisez pour la première
fois un gyroscope, demandez assistance à un modéliste expérimenté
90°
Angle
Coulisseau
Jeu env. 2 mm
Réglages / Trim
Dans un premier temps, nous vous conseillons de chercher le réglage pour
obtenir l 'efficacité maximale du gyroscope. C'est le point ou le rotor arrière se
stabilise et c'est là ou le gyroscope a la plus grande efficacité.
Tournez d'abord le potentiomètre de la sensibilité à fond, dans le sens des
aiguilles d'une montre, ce qui correspond à la sensibilité maximale, 100%. Sur
votre émetteur, limitez la course du servo à 2/3 de sa valeur, ce qui
correspond, sur une radio Graupner par ex. à 100% (de 0..150%). Des
valeurs plus élevées signifient une plus grande sensibilité et une tendance
plus forte à « gigoter », des valeurs plus faibles correspondent à une
meilleure tendance à stabiliser.
Mettez le gyroscope en mode Heading Lock, soit avec le Jumper, soit à
distance, et mettez le manche de commande de la sensibilité à fond. Au sol,
trimez de telle sorte à ce que le servo n'ait pas tendance à aller en butée.
Vérifiez le sens de fonctionnement du gyroscope en faisant de petits
décollages successifs. Puis décollez et trimez lorsque vous êtes en vol
stationnaire jusqu'à ce que le modèle soit stable et maintienne la direction. Ce
réglage n'est pas simple. Pour des raisons de sécurité, restez à hauteur du
sol, si vous constatez de trop fortes déviations, reposez immédiatement
l'appareil.
Sur votre émetteur, réglez la course du servo jusqu'à ce que l'arrière de
l'appareil soit complètement stabilisé.
Sur une radio Graupner par ex., si la valeur tombe sous les 80%, la course du
servo doit être raccourcie mécaniquement. Coté servo, fixez la tringle de
commande dans le trou du palonnier le plus à l'intérieur (c'est à dire le plus
près de l'axe de rotation du palonnier), sur l'ECO, vous pouvez en plus
décaler la fixation de la tringle (à l'arrière) vers l'extérieur du palonnier. Bien
entendu, d'autres facteurs ont également une influence sur le comportement
du modèle. Une construction trop souple ou trop rigide, le montage du
gyroscope, du jeu dans les tringles de commande ont évidemment une
influence sur le comportement du modèle tout entier.
Posez maintenant votre hélicoptère.
Si votre émetteur est équipé d'une mémoire de trim, enregistrez la position
des trims ou enregistrez tous les réglages du modèle.
Mettez vous en mode normal et décollez votre hélicoptère. Réglez de
nouveau les trims jusqu'à ce que votre modèle soit stable. Enregistrez les
nouvelles valeurs ou enregistrez tous ces réglages sous une nouvelle
mémoire.
Veillez à ce que le coulisseau, lorsque le servo est en fin de course, ne vienne
pas en butée, pour bien faire, il faut un jeu de 2 mm env. de part et d'autre.
Programmez votre émetteur de telle sorte que lorsque vous passez du mode
Heading Lock en mode normal, la mémoire des trims ou la mémoire complète
commute également, parce que les réglages du mode Heading Lock sont
différents de ceux en mode normal.
Comportement en mode Heading Lock
Dans ce mode, le gyroscope stabilise l'axe longitudinal, l'hélicoptère ne se
met pas dans la direction du vent comme
en mode normal.
Même par fort
vent, vous pouvez donc reculer avec votre modèle sans que celui soit
perturbé par ces conditions. Si vous effectuez des virages en faisant pivoter
le modèle autour de l'axe vertical, il faut savoir, qu'en mode Heading Lock, il
faut vraiment « piloter », étant donné que le gyroscope aura toujours
tendance à maintenir la direction de l'axe longitudinal.
Port PC
Vous pouvez affinez vos réglages directement sur votre PC à l'aide du cordon
interface disponible séparément
On peut ainsi optimiser les caractéristiques en vol, si dans des cas particuliers
vous n'arrivez pas à régler correctement l'appareil avec les conseils qui vous
sont donnés.
Mixages / compensation émetteur
Le mode Heading Lock ne tolère aucun mixage, par ex. anti-couple ou
moteur. En mode normal par contre, vous pouvez continuer à piloter avec des
mixages. Dans ce cas aucune compensation au niveau de l'émetteur n'est
nécessaire, étant donné que le
Profi Gyro
est équipé d'une propre
compensation automatique.







































































