
















HD1-E CANopen instruction manual
- 27 -
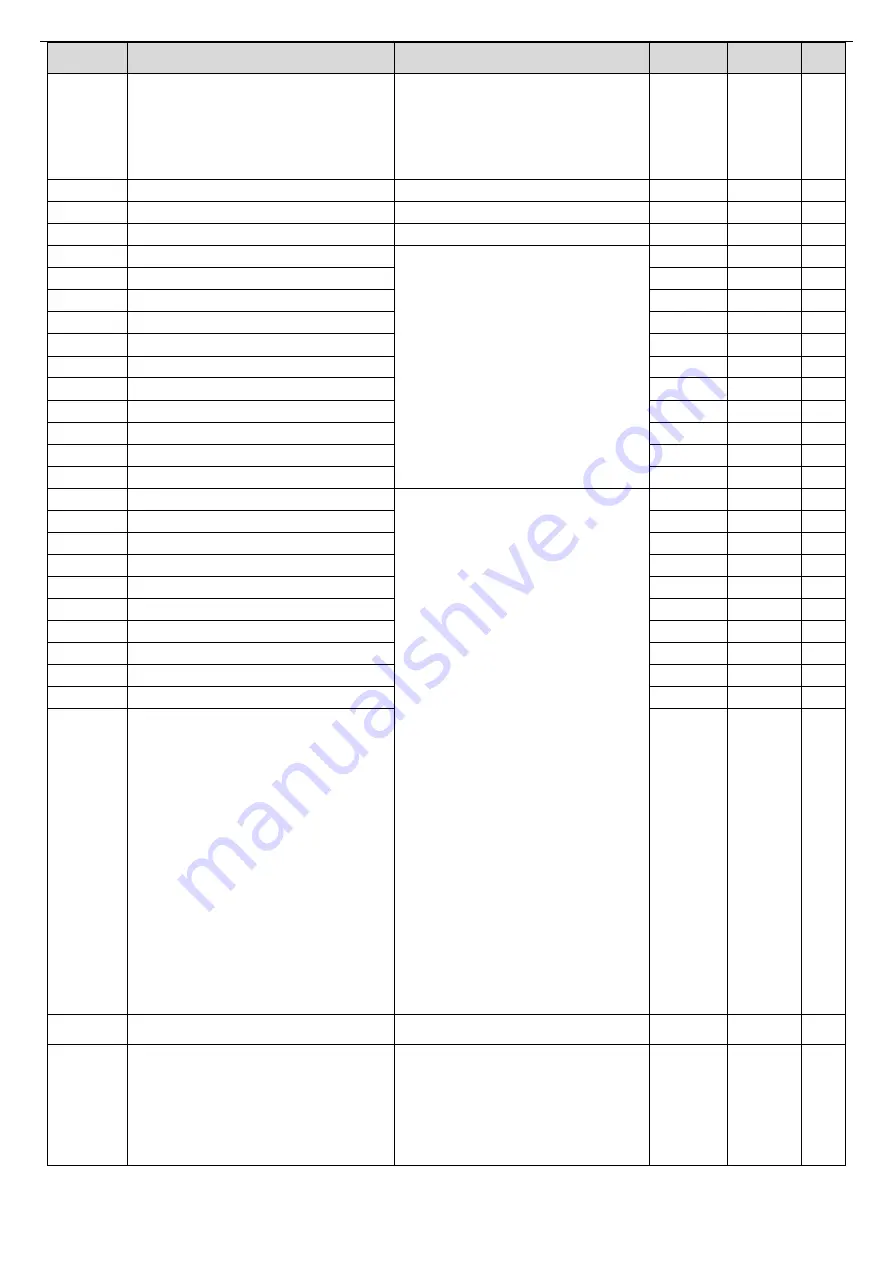
Function
code
Name
Detailed instruction of parameters
Setting
range
Default
value
Modify
33: Short circuit to earth fault2 (ETH2)
34: Speed deviation fault (dEu)
35: Detuning fault (STo)
36: Underload (LL)
37: Encoder offline (ENC1O)
38: Encoder reverse direction fault
(ENC1D)
P09.00
PID reference source
7: CANOPEN communication setting
0~9
0
○
P09.02
PID feedback source
5: CANOPEN communication feedback
0~7
0
○
P15.01
Module address
0~127
0~127
2
◎
P15.02
PZD2 receiving
0: Invalid
1: Set frequency
2: PID reference
3: PID feedback
4: Torque set value
5: Set value of forward upper limit
frequency
6: Set value of reverse upper limit
frequency
7: Upper limit of electric torque
8: Upper limit of braking torque
9: Virtual input terminal command
10: Virtual output terminal command
11: Voltage set value
12: AO output set value1
13: AO output set value2
0~20
0
○
P15.03
PZD3 receiving
0~20
0
○
P15.04
PZD4 receiving
0~20
0
○
P15.05
PZD5 receiving
0~20
0
○
P15.06
PZD6 receiving
0~20
0
○
P15.07
PZD7 receiving
0~20
0
○
P15.08
PZD8 receiving
0~20
0
○
P15.09
PZD9 receiving
0~20
0
○
P15.10
PZD10 receiving
0~20
0
○
P15.11
PZD11 receiving
0~20
0
○
P15.12
PZD12 receiving
0~20
0
○
P15.13
PZD2 sending
0: Invalid
1: Running frequency
(*100, Hz)
2: Set frequency
(*100, Hz)
3: Bus voltage
(*10, V)
4: Output voltage
(*1, V)
5: Output current
(*10, A)
6: Output torque actual value
(*10, %)
7: Output power actual value
(*10, %)
8: Rotating speed
(*1, RPM)
9: Linear speed
(*1, m/s)
10: Ramp reference frequency
11: Fault code
12: AI1 value
(*100, V)
13: AI2 value
(*100, V)
14: AI3 value
(*100, V)
15: PULSE frequency
(*100, kHz)
16: Terminal input state
17: Terminal output state
18: PID reference (*100, %)
19: PID feedback
(*100, %)
20: Motor rated torque
0~20
0
○
P15.14
PZD3 sending
0~20
0
○
P15.15
PZD4 sending
0~20
0
○
P15.16
PZD5 sending
0~20
0
○
P15.17
PZD6 sending
0~20
0
○
P15.18
PZD7 sending
0~20
0
○
P15.19
PZD8 sending
0~20
0
○
P15.20
PZD9 sending
0~20
0
○
P15.21
PZD10 sending
0~20
0
○
P15.22
PZD11 sending
0~20
0
○
P15.23
PZD12 sending
0~20
0
○
P15.26
Fault time of CANopen communication
timeout
0.0 (invalid), 0.1~60s
0.0~60.0
0.0
○
P15.27
CANopen communication baud rate
0: 1000k
1: 800k
2: 500k
3: 250k
4: 125k
5: 100k
6: 50k
7: 20k
0~7
0
○
Note: Select related CANOPEN channel to enable CANopen functions. If the inverte
r manual changes, information will be subject to CANopen
channel.







































































