



























SMT-BD2
Move the shaft with a low digital speed reference value up to a maintaining position (far enough from the axis limit
switches) where a free movement over 1 revolution, or 1 pole pitch for linear motors, is not dangerous for operator
and machine. Then execute the
Auto-tuning
procedure with the motor enabled at its maintaining position (digital
speed reference input set at 0). In case of loud noise in the motor at standstill and when running, check the rigidity
of the transmission between motor and load (backlashes and elasticities in gears and couplings). If necessary,
renew the
Auto-tuning
procedure by selecting a lower bandwidth (
Bandwidth
=
Medium
or
Low
). If the problem
remains, renew the
Auto-tuning
procedure by activating the
Antiresonance
filter.
!
During the
Auto-tuning
procedure execution with an unbalanced load (constant torque due to the gravity
effect on a vertical axis), a wrong operation may involve dangerous axis movements. It is the user's
responsibility to take all necessary steps in order to reduce the risk due to uncontrolled axis movements
during the operator's presence in the concerned area.
Test the motor running in both directions with a low digital speed reference value. If required, adjust with more
accuracy the speed loop response stability by means of the
Stability gain
buttons or by means of the adjustable
gain values.
Go back to the motor standstill position before switching on the
OFF
position.
3.6
-
S
AVING OF THE AMPLIFIER PARAMETERS
Save all parameters in the amplifier EEPROM by means of the
Save parameter to EEPROM
procedure.
3.7
-
M
OTOR PHASING AT POWER UP
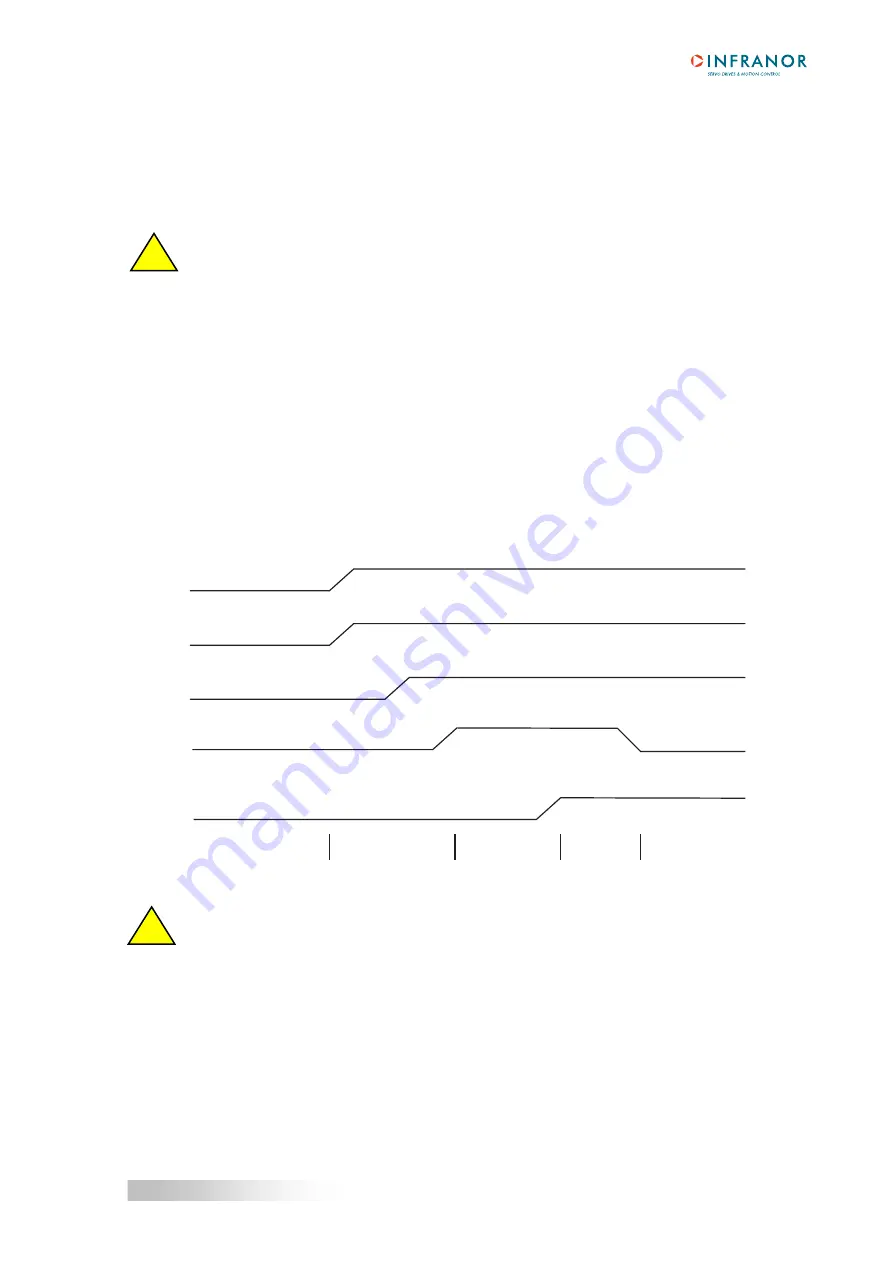
In the “incremental encoder ” configuration without HES, the motor phasing procedure must be executed
according to the following diagram at each amplifier power up:
CV0
X4-7
AMP. READY
X4-18, 19
POWER
READY
ENABLE
X4-20
PHASING OK
X4-5, 6
Power up
End power up
Ready
Start phasing
Phasing
End phasing
Stopped
Start running
Running
!
In the case of an axis with an unbalanced load (constant torque due to the gravity effect on a vertical
axis), the motor phasing procedure is not valid. The motor must be equipped with an incremental
e HES or an absolute single-turn Sin/Cos encoder.
41
Chapter 6 - Commissioning







































































