




























TITAN GO Product Manual |
Wiring and Connections
INGENIA | 2022-07-14 08:35:14
53
Manufacturer
Part Number
Image
Description
Littelfuse
200 A, 650 V
DC
fast-blow fuse. Can be
directly screwed to Titan M8 terminals.
Eaton Bussmann
200 A, 500 V
DC
fuse. Can be directly
screwed to Titan M8 terminals.
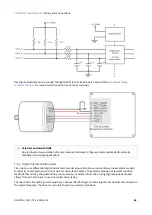
7.2.7 Logic power supply
Following are shown different power supply examples for logic.
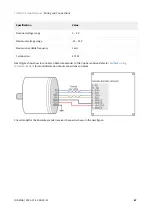
Manufacture
r
Part
Number
Rated Voltage
(V)
Rated Current
(A)
Image
Description
Tamura
TCDC-7001
24 V
1 A
Isolated wide DC input (190 V
to 1000 V) range switching
closed frame power supply
recommended for dual supply
with batteries. Use only to
power the logic.
TDK-Lambda
DSP30-24
24 V
1.3 A
AC input switching closed
frame power supply
recommended for dual supply.
Use only to power the logic.
Summary of Contents for Titan GO
Page 19: ...TITAN GO Product Manual Product Description INGENIA 2022 07 14 08 35 14 19 ...
Page 56: ...TITAN GO Product Manual Wiring and Connections INGENIA 2022 07 14 08 35 14 56 ...
Page 89: ...TITAN GO Product Manual Wiring and Connections INGENIA 2022 07 14 08 35 14 89 ...
Page 101: ...TITAN GO Product Manual Wiring and Connections INGENIA 2022 07 14 08 35 14 101 ...







































































